

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-49<br />
µ<br />
1<br />
0,8<br />
0,6<br />
0,4<br />
0,2<br />
NG<br />
NK<br />
Z<br />
0<br />
0 2 4 6 8 10<br />
ω S / K V<br />
PK<br />
PM<br />
Stellgröße U(t) / V<br />
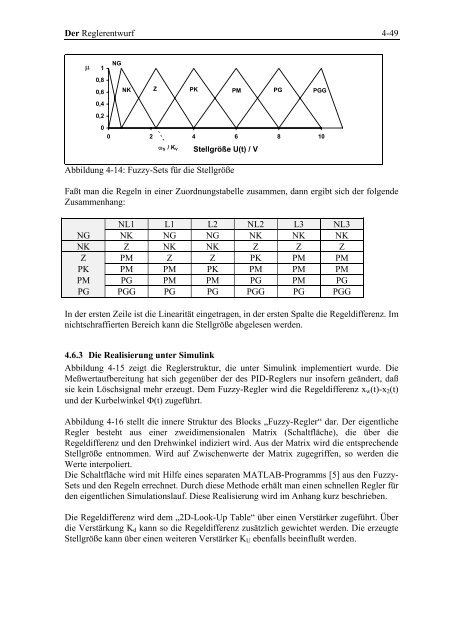
Abbildung 4-14: Fuzzy-Sets <strong>für</strong> <strong>die</strong> Stellgröße<br />
Faßt man <strong>die</strong> Regeln in <strong>eine</strong>r Zuordnungstabelle zusammen, dann ergibt sich der folgende<br />
Zusammenhang:<br />
NL1 L1 L2 NL2 L3 NL3<br />
NG NK NG NG NK NK NK<br />
NK Z NK NK Z Z Z<br />
Z PM Z Z PK PM PM<br />
PK PM PM PK PM PM PM<br />
PM PG PM PM PG PM PG<br />
PG PGG PG PG PGG PG PGG<br />
In der ersten Zeile ist <strong>die</strong> Linearität eingetragen, in der ersten Spalte <strong>die</strong> Regeldifferenz. Im<br />
nichtschraffierten Bereich kann <strong>die</strong> Stellgröße abgelesen werden.<br />
4.6.3 Die Realisierung unter Simulink<br />
Abbildung 4-15 zeigt <strong>die</strong> Reglerstruktur, <strong>die</strong> unter Simulink implementiert wurde. Die<br />
Meßwertaufbereitung hat sich gegen<strong>über</strong> der des PID-Reglers nur insofern geändert, daß<br />
sie kein Löschsignal mehr erzeugt. Dem Fuzzy-Regler wird <strong>die</strong> Regeldifferenz xw(t)-x2(t)<br />
und der Kurbelwinkel Φ(t) zugeführt.<br />
Abbildung 4-16 stellt <strong>die</strong> innere Struktur des Blocks „Fuzzy-Regler“ dar. Der eigentliche<br />
Regler besteht aus <strong>eine</strong>r zweidimensionalen Matrix (Schaltfläche), <strong>die</strong> <strong>über</strong> <strong>die</strong><br />
Regeldifferenz und den Drehwinkel indiziert wird. Aus der Matrix wird <strong>die</strong> entsprechende<br />
Stellgröße entnommen. Wird auf Zwischenwerte der Matrix zugegriffen, so werden <strong>die</strong><br />
Werte interpoliert.<br />
Die Schaltfläche wird mit Hilfe <strong>eine</strong>s separaten MATLAB-Programms [5] aus den Fuzzy-<br />
Sets und den Regeln errechnet. Durch <strong>die</strong>se Methode erhält man <strong>eine</strong>n schnellen Regler <strong>für</strong><br />
den eigentlichen Simulationslauf. Diese Realisierung wird im Anhang kurz beschrieben.<br />
Die Regeldifferenz wird dem „2D-Look-Up Table“ <strong>über</strong> <strong>eine</strong>n Verstärker zugeführt. Über<br />
<strong>die</strong> Verstärkung Kd kann so <strong>die</strong> Regeldifferenz zusätzlich gewichtet werden. Die erzeugte<br />
Stellgröße kann <strong>über</strong> <strong>eine</strong>n weiteren Verstärker KU ebenfalls beeinflußt werden.<br />
PG<br />
PGG




