

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Implementierungsvorschlag 5-75<br />
Stellgröße U(t) / V<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
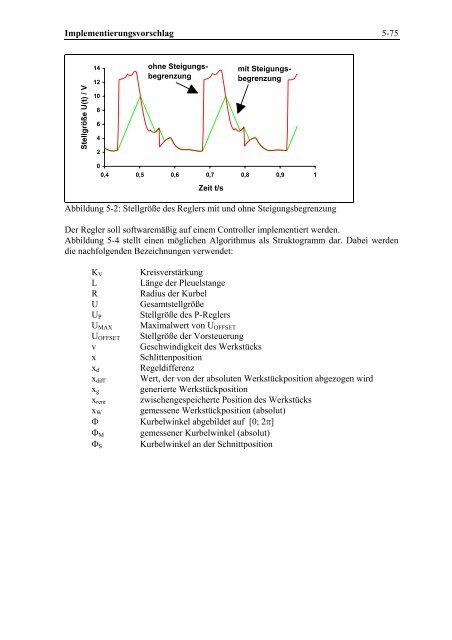
ohne Steigungsbegrenzung<br />
0<br />
0,4 0,5 0,6 0,7 0,8 0,9 1<br />
Zeit t/s<br />
mit Steigungsbegrenzung<br />
Abbildung 5-2: Stellgröße des Reglers mit und ohne Steigungsbegrenzung<br />
Der Regler soll softwaremäßig auf <strong>eine</strong>m Controller implementiert werden.<br />
Abbildung 5-4 stellt <strong>eine</strong>n möglichen Algorithmus als Struktogramm dar. Dabei werden<br />
<strong>die</strong> nachfolgenden Bezeichnungen verwendet:<br />
KV Kreisverstärkung<br />
L Länge der Pleuelstange<br />
R Radius der Kurbel<br />
U Gesamtstellgröße<br />
UP Stellgröße des P-Reglers<br />
UMAX Maximalwert von UOFFSET<br />
UOFFSET Stellgröße der Vorsteuerung<br />
v Geschwindigkeit des Werkstücks<br />
x Schlittenposition<br />
xd Regeldifferenz<br />
xdiff Wert, der von der absoluten Werkstückposition abgezogen wird<br />
xg generierte Werkstückposition<br />
xrem zwischengespeicherte Position des Werkstücks<br />
xW gemessene Werkstückposition (absolut)<br />
Φ Kurbelwinkel abgebildet auf [0; 2π]<br />
ΦM gemessener Kurbelwinkel (absolut)<br />
Kurbelwinkel an der Schnittposition<br />
ΦS




