

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-43<br />
• Aus der Forderung nach Regelgenauigkeit folgt ein I-Anteil.<br />
Die Eingangsgröße des Regelkreises ist <strong>die</strong> Summe aus <strong>eine</strong>r Sprungfunktion und <strong>eine</strong>r<br />
Rampenfunktion.<br />
k1<br />
k 2 k ⋅ s+ k<br />
Ws ()= + = 2<br />
2<br />
s s s<br />
1 2<br />
Der offene Regelkreis hat nach Gleichung (54) verzögertes I 2 -Verhalten, so daß <strong>die</strong><br />
bleibende Regelabweichung bei <strong>eine</strong>r rampenförmigen Eingangsgröße gegen Null strebt<br />
[7].<br />
4.5.2 Modellierung des Reglers<br />
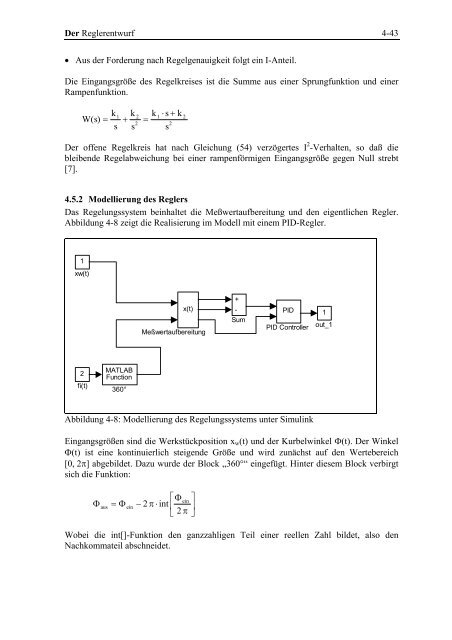
Das Regelungssystem beinhaltet <strong>die</strong> Meßwertaufbereitung und den eigentlichen Regler.<br />
Abbildung 4-8 zeigt <strong>die</strong> Realisierung im Modell mit <strong>eine</strong>m PID-Regler.<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
+<br />
-<br />
Sum<br />
PID<br />
PID Controller<br />
Abbildung 4-8: Modellierung des Regelungssystems unter Simulink<br />
1<br />
out_1<br />
Eingangsgrößen sind <strong>die</strong> Werkstückposition xw(t) und der Kurbelwinkel Φ(t). Der Winkel<br />
Φ(t) ist <strong>eine</strong> kontinuierlich steigende Größe und wird zunächst auf den Wertebereich<br />
[0, 2π] abgebildet. Dazu wurde der Block „360°“ eingefügt. Hinter <strong>die</strong>sem Block verbirgt<br />
sich <strong>die</strong> Funktion:<br />
⎡Φ<br />
ein ⎤<br />
Φaus = Φein−2π⋅int<br />
⎢ ⎥<br />
⎣ 2 π ⎦<br />
Wobei <strong>die</strong> int[]-Funktion den ganzzahligen Teil <strong>eine</strong>r reellen Zahl bildet, also den<br />
Nachkommateil abschneidet.




