

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-53<br />
(x2(t) - xW(t)) / m<br />
0,0015<br />
0,001<br />
0,0005<br />
0<br />
0,55<br />
-0,0005<br />
0,57 0,59 0,61 0,63 0,65<br />
-0,001<br />
-0,0015<br />
-0,002<br />
-0,0025<br />
-0,003<br />
lW=0,5 m<br />
x2(t) / m<br />
lW=0,36 m<br />
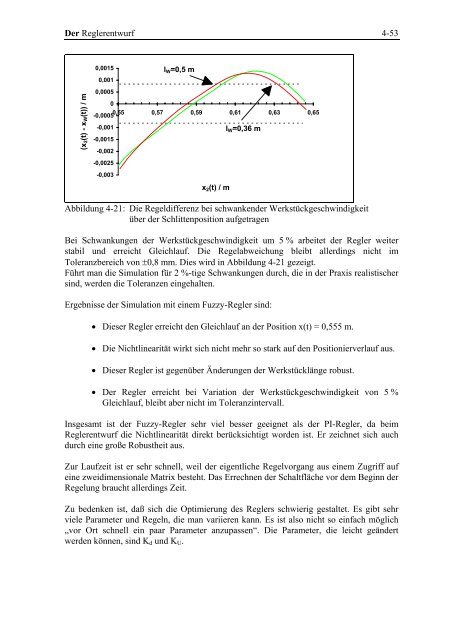
Abbildung 4-21: Die Regeldifferenz bei schwankender Werkstückgeschwindigkeit<br />
<strong>über</strong> der Schlittenposition aufgetragen<br />
Bei Schwankungen der Werkstückgeschwindigkeit um 5 % arbeitet der Regler weiter<br />
stabil und erreicht Gleichlauf. Die Regelabweichung bleibt allerdings nicht im<br />
Toleranzbereich von ±0,8 mm. Dies wird in Abbildung 4-21 gezeigt.<br />
Führt man <strong>die</strong> Simulation <strong>für</strong> 2 %-tige Schwankungen durch, <strong>die</strong> in der Praxis realistischer<br />
sind, werden <strong>die</strong> Toleranzen eingehalten.<br />
Ergebnisse der Simulation mit <strong>eine</strong>m Fuzzy-Regler sind:<br />
• Dieser Regler erreicht den Gleichlauf an der Position x(t) = 0,555 m.<br />
• Die Nichtlinearität wirkt sich nicht mehr so stark auf den Positionierverlauf aus.<br />
• Dieser Regler ist gegen<strong>über</strong> Änderungen der Werkstücklänge robust.<br />
• Der Regler erreicht bei Variation der Werkstückgeschwindigkeit von 5 %<br />
Gleichlauf, bleibt aber nicht im Toleranzintervall.<br />
Insgesamt ist der Fuzzy-Regler sehr viel besser geeignet als der PI-Regler, da beim<br />
<strong>Reglerentwurf</strong> <strong>die</strong> Nichtlinearität direkt berücksichtigt worden ist. Er zeichnet sich auch<br />
durch <strong>eine</strong> große Robustheit aus.<br />
Zur Laufzeit ist er sehr schnell, weil der eigentliche Regelvorgang aus <strong>eine</strong>m Zugriff auf<br />
<strong>eine</strong> zweidimensionale Matrix besteht. Das Errechnen der Schaltfläche vor dem Beginn der<br />
Regelung braucht allerdings Zeit.<br />
Zu bedenken ist, daß sich <strong>die</strong> Optimierung des Reglers schwierig gestaltet. Es gibt sehr<br />
viele Parameter und Regeln, <strong>die</strong> man variieren kann. Es ist also nicht so einfach möglich<br />
„vor Ort schnell ein paar Parameter anzupassen“. Die Parameter, <strong>die</strong> leicht geändert<br />
werden können, sind Kd und KU.




