

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-58<br />
(x2(t) - xW(t) ) / m<br />
0,003<br />
0,002<br />
0,001<br />
0<br />
-0,0010,55<br />
0,57 0,59 0,61 0,63 0,65<br />
-0,002<br />
-0,003<br />
-0,004<br />
-0,005<br />
-0,006<br />
-0,007<br />
lW=0,5 m<br />
Zeit t/s<br />
lW=0,36 m<br />
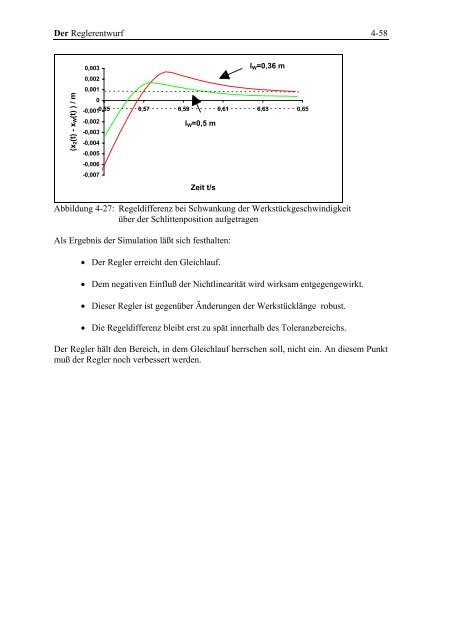
Abbildung 4-27: Regeldifferenz bei Schwankung der Werkstückgeschwindigkeit<br />
<strong>über</strong> der Schlittenposition aufgetragen<br />
Als Ergebnis der Simulation läßt sich festhalten:<br />
• Der Regler erreicht den Gleichlauf.<br />
• Dem negativen Einfluß der Nichtlinearität wird wirksam entgegengewirkt.<br />
• Dieser Regler ist gegen<strong>über</strong> Änderungen der Werkstücklänge robust.<br />
• Die Regeldifferenz bleibt erst zu spät innerhalb des Toleranzbereichs.<br />
Der Regler hält den Bereich, in dem Gleichlauf herrschen soll, nicht ein. An <strong>die</strong>sem Punkt<br />
muß der Regler noch verbessert werden.




