

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-63<br />
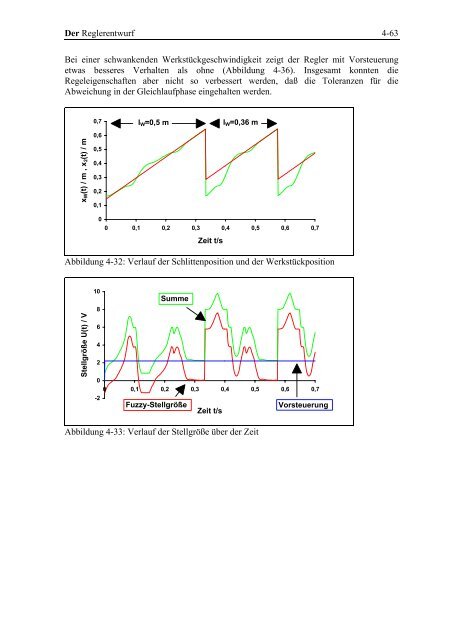
Bei <strong>eine</strong>r schwankenden Werkstückgeschwindigkeit zeigt der Regler mit Vorsteuerung<br />
etwas besseres Verhalten als ohne (Abbildung 4-36). Insgesamt konnten <strong>die</strong><br />
Regeleigenschaften aber nicht so verbessert werden, daß <strong>die</strong> Toleranzen <strong>für</strong> <strong>die</strong><br />
Abweichung in der Gleichlaufphase eingehalten werden.<br />
xW(t) / m , x2(t) / m<br />
0,7<br />
0,6<br />
0,5<br />
0,4<br />
0,3<br />
0,2<br />
0,1<br />
lW=0,5 m<br />
0<br />
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7<br />
Zeit t/s<br />
lW=0,36 m<br />
Abbildung 4-32: Verlauf der Schlittenposition und der Werkstückposition<br />
Stellgröße U(t) / V<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7<br />
-2<br />
Summe<br />
Fuzzy-Stellgröße Vorsteuerung<br />
Zeit t/s<br />
Abbildung 4-33: Verlauf der Stellgröße <strong>über</strong> der Zeit




