

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-56<br />
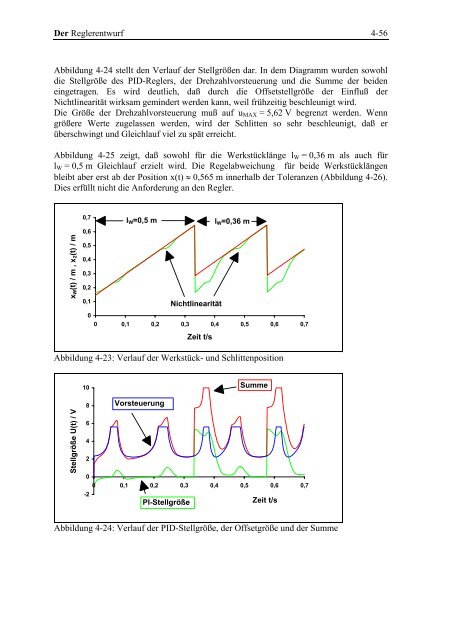
Abbildung 4-24 stellt den Verlauf der Stellgrößen dar. In dem Diagramm wurden sowohl<br />
<strong>die</strong> Stellgröße des PID-Reglers, der Drehzahlvorsteuerung und <strong>die</strong> Summe der beiden<br />
eingetragen. Es wird deutlich, daß durch <strong>die</strong> Offsetstellgröße der Einfluß der<br />
Nichtlinearität wirksam gemindert werden kann, weil frühzeitig beschleunigt wird.<br />
Die Größe der Drehzahlvorsteuerung muß auf uMAX = 5,62 V begrenzt werden. Wenn<br />
größere Werte zugelassen werden, wird der Schlitten so sehr beschleunigt, daß er<br />
<strong>über</strong>schwingt und Gleichlauf viel zu spät erreicht.<br />
Abbildung 4-25 zeigt, daß sowohl <strong>für</strong> <strong>die</strong> Werkstücklänge lW = 0,36 m als auch <strong>für</strong><br />
lW = 0,5 m Gleichlauf erzielt wird. Die Regelabweichung <strong>für</strong> beide Werkstücklängen<br />
bleibt aber erst ab der Position x(t) ≈ 0,565 m innerhalb der Toleranzen (Abbildung 4-26).<br />
Dies erfüllt nicht <strong>die</strong> Anforderung an den Regler.<br />
xW(t) / m , x2(t) / m<br />
0,7<br />
0,6<br />
0,5<br />
0,4<br />
0,3<br />
0,2<br />
0,1<br />
lW=0,5 m lW=0,36 m<br />
Nichtlinearität<br />
0<br />
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7<br />
Zeit t/s<br />
Abbildung 4-23: Verlauf der Werkstück- und Schlittenposition<br />
Stellgröße U(t) / V<br />
10<br />
8<br />
6<br />
4<br />
2<br />
Vorsteuerung<br />
Summe<br />
0<br />
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7<br />
-2<br />
PI-Stellgröße<br />
Zeit t/s<br />
Abbildung 4-24: Verlauf der PID-Stellgröße, der Offsetgröße und der Summe




