

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
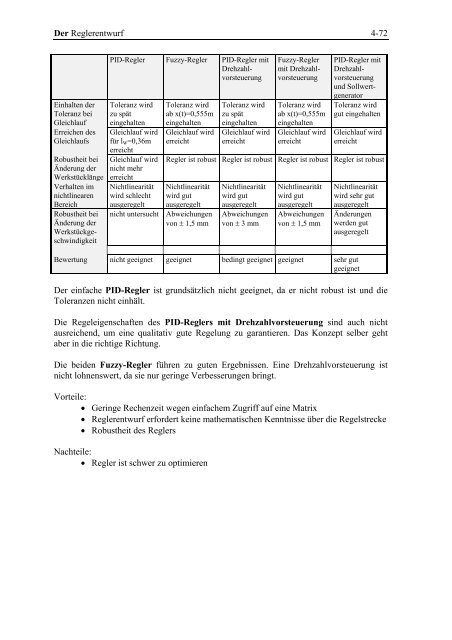
Der <strong>Reglerentwurf</strong> 4-72<br />
Einhalten der<br />
Toleranz bei<br />
Gleichlauf<br />
Erreichen des<br />
Gleichlaufs<br />
Robustheit bei<br />
Änderung der<br />
Werkstücklänge<br />
Verhalten im<br />
nichtlinearen<br />
Bereich<br />
Robustheit bei<br />
Änderung der<br />
Werkstückgeschwindigkeit<br />
PID-Regler Fuzzy-Regler PID-Regler mit<br />
Drehzahlvorsteuerung<br />
Toleranz wird<br />
zu spät<br />
eingehalten<br />
Gleichlauf wird<br />
<strong>für</strong> lW=0,36m<br />
erreicht<br />
Gleichlauf wird<br />
nicht mehr<br />
erreicht<br />
Nichtlinearität<br />
wird schlecht<br />
ausgeregelt<br />
Toleranz wird<br />
ab x(t)=0,555m<br />
eingehalten<br />
Gleichlauf wird<br />
erreicht<br />
Toleranz wird<br />
zu spät<br />
eingehalten<br />
Gleichlauf wird<br />
erreicht<br />
Fuzzy-Regler<br />
mit Drehzahlvorsteuerung<br />
Toleranz wird<br />
ab x(t)=0,555m<br />
eingehalten<br />
Gleichlauf wird<br />
erreicht<br />
PID-Regler mit<br />
Drehzahlvorsteuerung<br />
und Sollwert-<br />
generator<br />
Toleranz wird<br />
gut eingehalten<br />
Gleichlauf wird<br />
erreicht<br />
Regler ist robust Regler ist robust Regler ist robust Regler ist robust<br />
Nichtlinearität<br />
wird gut<br />
ausgeregelt<br />
nicht untersucht Abweichungen<br />
von ± 1,5 mm<br />
Nichtlinearität<br />
wird gut<br />
ausgeregelt<br />
Abweichungen<br />
von ± 3 mm<br />
Nichtlinearität<br />
wird gut<br />
ausgeregelt<br />
Abweichungen<br />
von ± 1,5 mm<br />
Nichtlinearität<br />
wird sehr gut<br />
ausgeregelt<br />
Änderungen<br />
werden gut<br />
ausgeregelt<br />
Bewertung nicht geeignet geeignet bedingt geeignet geeignet sehr gut<br />
geeignet<br />
Der einfache PID-Regler ist grundsätzlich nicht geeignet, da er nicht robust ist und <strong>die</strong><br />
Toleranzen nicht einhält.<br />
Die Regeleigenschaften des PID-Reglers mit Drehzahlvorsteuerung sind auch nicht<br />
ausreichend, um <strong>eine</strong> qualitativ gute Regelung zu garantieren. Das Konzept selber geht<br />
aber in <strong>die</strong> richtige Richtung.<br />
Die beiden Fuzzy-Regler führen zu guten Ergebnissen. Eine Drehzahlvorsteuerung ist<br />
nicht lohnenswert, da sie nur geringe Verbesserungen bringt.<br />
Vorteile:<br />
• Geringe Rechenzeit wegen einfachem Zugriff auf <strong>eine</strong> Matrix<br />
• <strong>Reglerentwurf</strong> erfordert k<strong>eine</strong> mathematischen Kenntnisse <strong>über</strong> <strong>die</strong> Regelstrecke<br />
• Robustheit des Reglers<br />
Nachteile:<br />
• Regler ist schwer zu optimieren




