

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Implementierungsvorschlag 5-76<br />
Es werden <strong>die</strong> folgenden Schritte abgearbeitet:<br />
1. Die Werkstückgeschwindigkeit wird ermittelt. Dies kann durch Differenzbildung<br />
<strong>über</strong> kl<strong>eine</strong> Zeitintervalle realisiert werden.<br />
2. Der Drehwinkel wird auf [0; 2π] abgebildet.<br />
3. Die Schlittenposition wird aus dem Winkel errechnet.<br />
4. Abhängig vom Kurbelwinkel wird <strong>eine</strong> Fallunterscheidung vorgenommen. Diese ist<br />
notwendig, um <strong>die</strong> Zusammenhänge (50), (52) und (55) zu programmieren. Das<br />
Flag „flg“ wird gebraucht um zu erreichen, daß xdiff genau an der Schnittposition xS<br />
gesetzt wird und nicht später nocheinmal.<br />
5. Aus der generierten Werkstück- und Schlittenposition wird <strong>die</strong> Regelabweichung<br />
xd gebildet.<br />
6. Durch Multiplikation mit dem Verstärkungsfaktor KP wird <strong>die</strong> Stellgröße UP<br />
erzeugt.<br />
7. Die Stellgröße der Drehzahlvorsteuerung UOFFSET wird errechnet und auf UMAX<br />
begrenzt.<br />
8. Aus <strong>die</strong>sen beiden Stellgrößen resultiert durch Addition <strong>die</strong> Ausgangsgröße.<br />
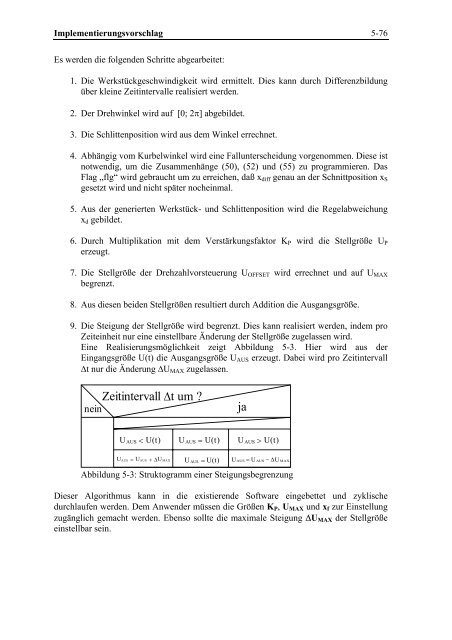
9. Die Steigung der Stellgröße wird begrenzt. Dies kann realisiert werden, indem pro<br />
Zeiteinheit nur <strong>eine</strong> einstellbare Änderung der Stellgröße zugelassen wird.<br />
Eine Realisierungsmöglichkeit zeigt Abbildung 5-3. Hier wird aus der<br />
Eingangsgröße U(t) <strong>die</strong> Ausgangsgröße UAUS erzeugt. Dabei wird pro Zeitintervall<br />
∆t nur <strong>die</strong> Änderung ∆UMAX zugelassen.<br />
nein<br />
Zeitintervall ∆t um ?<br />
ja<br />
UAUS < U() t UAUS = U() t UAUS > Ut ()<br />
UAUS = UAUS + ∆UMAX UAUS = U() t U = U −∆U<br />
AUS AUS MAX<br />
Abbildung 5-3: Struktogramm <strong>eine</strong>r Steigungsbegrenzung<br />
Dieser Algorithmus kann in <strong>die</strong> existierende Software eingebettet und zyklische<br />
durchlaufen werden. Dem Anwender müssen <strong>die</strong> Größen KP, UMAX und xf zur Einstellung<br />
zugänglich gemacht werden. Ebenso sollte <strong>die</strong> maximale Steigung ∆UMAX der Stellgröße<br />
einstellbar sein.




