

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Implementierungsvorschlag 5-74<br />
5 Implementierungsvorschlag<br />
Das Regelkonzept mit Drehzahlvorsteuerung und Sollwertgenerator zeigt <strong>die</strong> besten<br />
Simulationsergebnisse. Es ist in der Entwicklung am schnellsten zu realisieren, da es dem<br />
bereits existierenden Regelungsprinzip von LENORD + BAUER sehr ähnlich ist.<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
xw(t)<br />
Sollwertgen.<br />
du/dt<br />
v(t)<br />
+<br />
-<br />
Sum<br />
+n<br />
Drehzahlvorsteuerung<br />
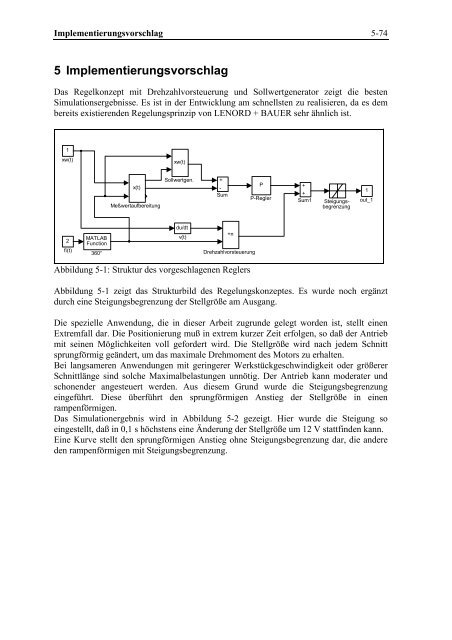
Abbildung 5-1: Struktur des vorgeschlagenen Reglers<br />
P<br />
P-Regler<br />
+<br />
+<br />
Sum1 Steigungsbegrenzung<br />
Abbildung 5-1 zeigt das Strukturbild des Regelungskonzeptes. Es wurde noch ergänzt<br />
durch <strong>eine</strong> Steigungsbegrenzung der Stellgröße am Ausgang.<br />
Die spezielle Anwendung, <strong>die</strong> in <strong>die</strong>ser Arbeit zugrunde gelegt worden ist, stellt <strong>eine</strong>n<br />
Extremfall dar. Die Positionierung muß in extrem kurzer Zeit erfolgen, so daß der Antrieb<br />
mit s<strong>eine</strong>n Möglichkeiten voll gefordert wird. Die Stellgröße wird nach jedem Schnitt<br />
sprungförmig geändert, um das maximale Drehmoment des Motors zu erhalten.<br />
Bei langsameren Anwendungen mit geringerer Werkstückgeschwindigkeit oder größerer<br />
Schnittlänge sind solche Maximalbelastungen unnötig. Der Antrieb kann moderater und<br />
schonender angesteuert werden. Aus <strong>die</strong>sem Grund wurde <strong>die</strong> Steigungsbegrenzung<br />
eingeführt. Diese <strong>über</strong>führt den sprungförmigen Anstieg der Stellgröße in <strong>eine</strong>n<br />
rampenförmigen.<br />
Das Simulationergebnis wird in Abbildung 5-2 gezeigt. Hier wurde <strong>die</strong> Steigung so<br />
eingestellt, daß in 0,1 s höchstens <strong>eine</strong> Änderung der Stellgröße um 12 V stattfinden kann.<br />
Eine Kurve stellt den sprungförmigen Anstieg ohne Steigungsbegrenzung dar, <strong>die</strong> andere<br />
den rampenförmigen mit Steigungsbegrenzung.<br />
1<br />
out_1




