

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-70<br />
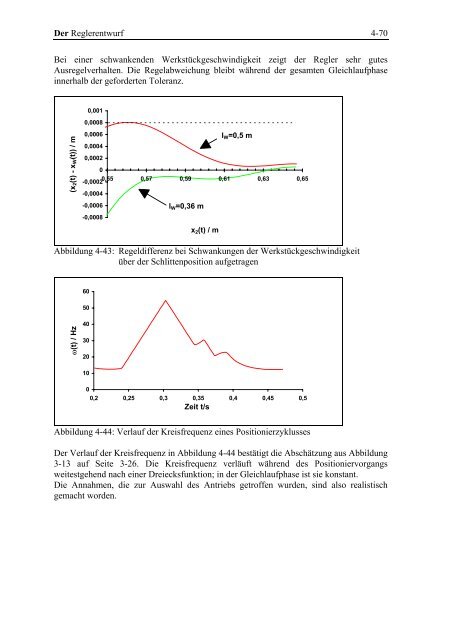
Bei <strong>eine</strong>r schwankenden Werkstückgeschwindigkeit zeigt der Regler sehr gutes<br />
Ausregelverhalten. Die Regelabweichung bleibt während der gesamten Gleichlaufphase<br />
innerhalb der geforderten Toleranz.<br />
(x2(t) - xW(t)) / m<br />
0,001<br />
0,0008<br />
0,0006<br />
0,0004<br />
0,0002<br />
0<br />
0,55<br />
-0,0002<br />
0,57 0,59 0,61 0,63 0,65<br />
-0,0004<br />
-0,0006<br />
-0,0008<br />
lW=0,36 m<br />
x2(t) / m<br />
lW=0,5 m<br />
Abbildung 4-43: Regeldifferenz bei Schwankungen der Werkstückgeschwindigkeit<br />
<strong>über</strong> der Schlittenposition aufgetragen<br />
ω(t) / Hz<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0,2 0,25 0,3 0,35 0,4 0,45 0,5<br />
Zeit t/s<br />
Abbildung 4-44: Verlauf der Kreisfrequenz <strong>eine</strong>s Positionierzyklusses<br />
Der Verlauf der Kreisfrequenz in Abbildung 4-44 bestätigt <strong>die</strong> Abschätzung aus Abbildung<br />
3-13 auf Seite 3-26. Die Kreisfrequenz verläuft während des Positioniervorgangs<br />
weitestgehend nach <strong>eine</strong>r Dreiecksfunktion; in der Gleichlaufphase ist sie konstant.<br />
Die Annahmen, <strong>die</strong> zur Auswahl des Antriebs getroffen wurden, sind also realistisch<br />
gemacht worden.




