

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Der <strong>Reglerentwurf</strong> 4-50<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
+<br />
-<br />
Sum<br />
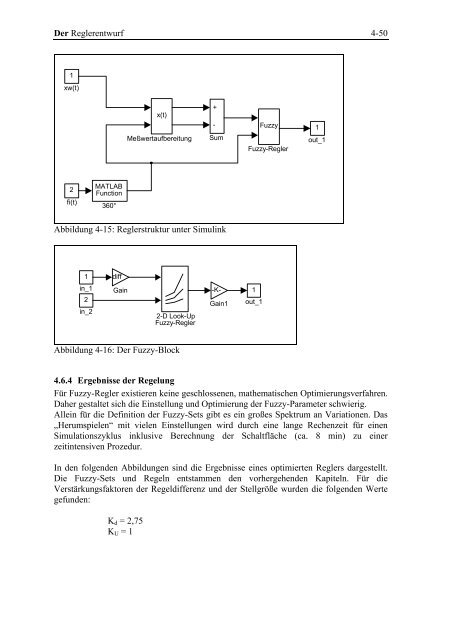
Abbildung 4-15: Reglerstruktur unter Simulink<br />
1<br />
in_1<br />
2<br />
in_2<br />
diff<br />
Gain<br />
2-D Look-Up<br />
Fuzzy-Regler<br />
Abbildung 4-16: Der Fuzzy-Block<br />
-K-<br />
Gain1<br />
Fuzzy<br />
Fuzzy-Regler<br />
1<br />
out_1<br />
1<br />
out_1<br />
4.6.4 Ergebnisse der Regelung<br />
Für Fuzzy-Regler existieren k<strong>eine</strong> geschlossenen, mathematischen Optimierungsverfahren.<br />
Daher gestaltet sich <strong>die</strong> Einstellung und Optimierung der Fuzzy-Parameter schwierig.<br />
Allein <strong>für</strong> <strong>die</strong> Definition der Fuzzy-Sets gibt es ein großes Spektrum an Variationen. Das<br />
„Herumspielen“ mit vielen Einstellungen wird durch <strong>eine</strong> lange Rechenzeit <strong>für</strong> <strong>eine</strong>n<br />
Simulationszyklus inklusive Berechnung der Schaltfläche (ca. 8 min) zu <strong>eine</strong>r<br />
zeitintensiven Prozedur.<br />
In den folgenden Abbildungen sind <strong>die</strong> Ergebnisse <strong>eine</strong>s optimierten Reglers dargestellt.<br />
Die Fuzzy-Sets und Regeln entstammen den vorhergehenden Kapiteln. Für <strong>die</strong><br />
Verstärkungsfaktoren der Regeldifferenz und der Stellgröße wurden <strong>die</strong> folgenden Werte<br />
gefunden:<br />
Kd = 2,75<br />
KU = 1




