

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Der <strong>Reglerentwurf</strong> 4-46<br />
(x2(t)-xW(t))/m<br />
0,06<br />
0,04<br />
0,02<br />
0<br />
-0,02 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7<br />
-0,04<br />
-0,06<br />
-0,08<br />
-0,1<br />
-0,12<br />
-0,14<br />
Gleichlauf<br />
Zeit t/s<br />
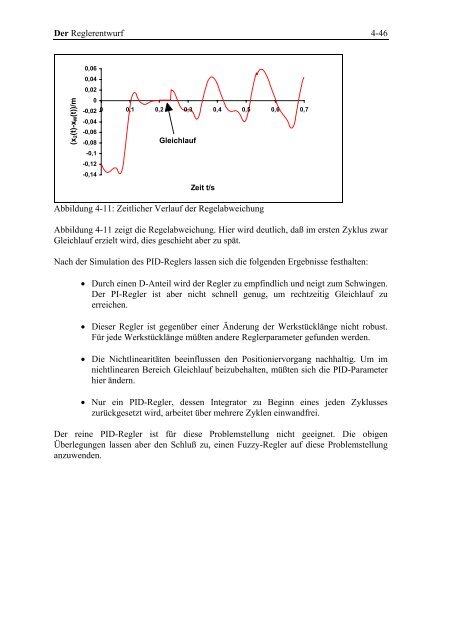
Abbildung 4-11: Zeitlicher Verlauf der Regelabweichung<br />
Abbildung 4-11 zeigt <strong>die</strong> Regelabweichung. Hier wird deutlich, daß im ersten Zyklus zwar<br />
Gleichlauf erzielt wird, <strong>die</strong>s geschieht aber zu spät.<br />
Nach der Simulation des PID-Reglers lassen sich <strong>die</strong> folgenden Ergebnisse festhalten:<br />
• Durch <strong>eine</strong>n D-Anteil wird der Regler zu empfindlich und neigt zum Schwingen.<br />
Der PI-Regler ist aber nicht schnell genug, um rechtzeitig Gleichlauf zu<br />
erreichen.<br />
• Dieser Regler ist gegen<strong>über</strong> <strong>eine</strong>r Änderung der Werkstücklänge nicht robust.<br />
Für jede Werkstücklänge müßten andere Reglerparameter gefunden werden.<br />
• Die Nichtlinearitäten beeinflussen den Positioniervorgang nachhaltig. Um im<br />
nichtlinearen Bereich Gleichlauf beizubehalten, müßten sich <strong>die</strong> PID-Parameter<br />
hier ändern.<br />
• Nur ein PID-Regler, dessen Integrator zu Beginn <strong>eine</strong>s jeden Zyklusses<br />
zurückgesetzt wird, arbeitet <strong>über</strong> mehrere Zyklen einwandfrei.<br />
Der r<strong>eine</strong> PID-Regler ist <strong>für</strong> <strong>die</strong>se Problemstellung nicht geeignet. Die obigen<br />
Überlegungen lassen aber den Schluß zu, <strong>eine</strong>n Fuzzy-Regler auf <strong>die</strong>se Problemstellung<br />
anzuwenden.




