

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Der <strong>Reglerentwurf</strong> 4-66<br />
4.9 PID-Regler mit Drehzahlvorsteuerung und Sollwertgenerator<br />
Bei allen bisher erprobten Reglerkonzepten stellte sich das rechtzeitige Erreichen des<br />
Gleichlaufs innerhalb der Toleranzen als Problem heraus. Selbst bei den Fuzzy-Reglern<br />
wurde Gleichlauf nur sehr knapp innerhalb der geforderten Grenzen erreicht.<br />
Grund da<strong>für</strong> ist, daß der Schlitten am hinteren Umkehrpunkt kurz stehen bleibt, vom<br />
Werkstück <strong>über</strong>holt wird und es nicht mehr rechtzeitg schafft, es wieder einzuholen. Dies<br />
kann verhindert werden, indem man den Schlitten dem Werkstück bis zum hinteren<br />
Wendepunkt vorlaufen läßt. Wenn er dann zum Stillstand kommt wird er vom Werkstück<br />
eingeholt und kann im Gleichlauf weiterfahren.<br />
Dies soll mit <strong>eine</strong>m Sollwertgenerator realisiert werden, der dem Regler bis zum<br />
Drehwinkel Φ(t) = 360° <strong>eine</strong> nach vorne verlagerte Werkstückposition vorgibt und <strong>die</strong>se<br />
dann ab 0° wieder auf <strong>die</strong> reale Position zurücksetzt.<br />
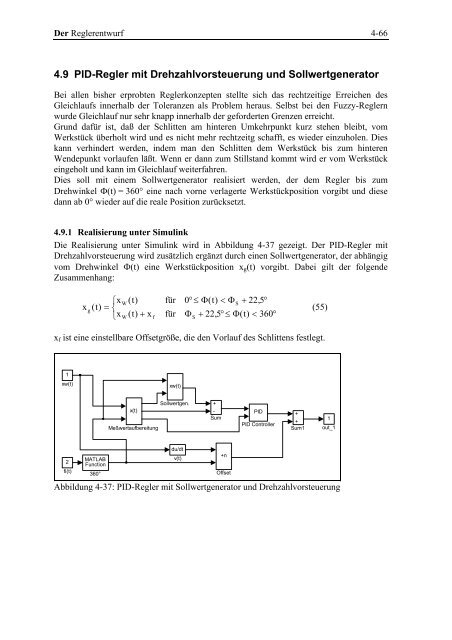
4.9.1 Realisierung unter Simulink<br />
Die Realisierung unter Simulink wird in Abbildung 4-37 gezeigt. Der PID-Regler mit<br />
Drehzahlvorsteuerung wird zusätzlich ergänzt durch <strong>eine</strong>n Sollwertgenerator, der abhängig<br />
vom Drehwinkel Φ(t) <strong>eine</strong> Werkstückposition xg(t) vorgibt. Dabei gilt der folgende<br />
Zusammenhang:<br />
⎧xW()<br />
t <strong>für</strong> 0°≤ Φ() t < ΦS<br />
+ 225 , °<br />
xg() t = ⎨<br />
⎩xW()<br />
t + xf <strong>für</strong> ΦS + 22, 5°≤ Φ()<br />
t < 360°<br />
xf ist <strong>eine</strong> einstellbare Offsetgröße, <strong>die</strong> den Vorlauf des Schlittens festlegt.<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
xw(t)<br />
Sollwertgen.<br />
du/dt<br />
v(t)<br />
+<br />
-<br />
Sum<br />
+n<br />
Offset<br />
PID<br />
PID Controller<br />
+<br />
+<br />
Sum1<br />
(55)<br />
1<br />
out_1<br />
Abbildung 4-37: PID-Regler mit Sollwertgenerator und Drehzahlvorsteuerung




