Operating Instruction - Frequency Inverter 230V / 400V ... - opis.cz
Operating Instruction - Frequency Inverter 230V / 400V ... - opis.cz
Operating Instruction - Frequency Inverter 230V / 400V ... - opis.cz
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
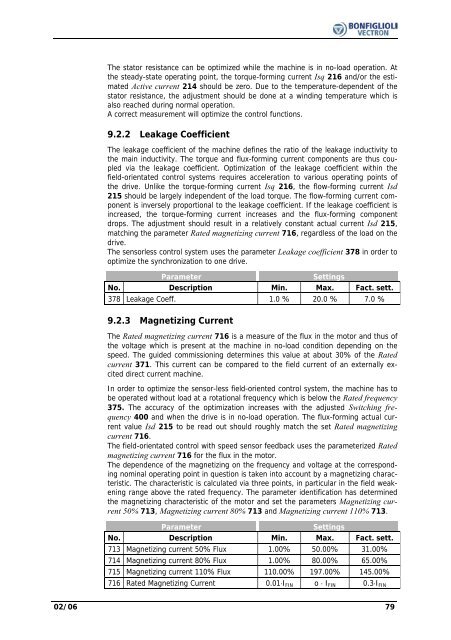
The stator resistance can be optimized while the machine is in no-load operation. Atthe steady-state operating point, the torque-forming current Isq 216 and/or the estimatedActive current 214 should be zero. Due to the temperature-dependent of thestator resistance, the adjustment should be done at a winding temperature which isalso reached during normal operation.A correct measurement will optimize the control functions.9.2.2 Leakage CoefficientThe leakage coefficient of the machine defines the ratio of the leakage inductivity tothe main inductivity. The torque and flux-forming current components are thus coupledvia the leakage coefficient. Optimization of the leakage coefficient within thefield-orientated control systems requires acceleration to various operating points ofthe drive. Unlike the torque-forming current Isq 216, the flow-forming current Isd215 should be largely independent of the load torque. The flow-forming current componentis inversely proportional to the leakage coefficient. If the leakage coefficient isincreased, the torque-forming current increases and the flux-forming componentdrops. The adjustment should result in a relatively constant actual current Isd 215,matching the parameter Rated magnetizing current 716, regardless of the load on thedrive.The sensorless control system uses the parameter Leakage coefficient 378 in order tooptimize the synchronization to one drive.ParameterSettingsNo. Description Min. Max. Fact. sett.378 Leakage Coeff. 1.0 % 20.0 % 7.0 %9.2.3 Magnetizing CurrentThe Rated magnetizing current 716 is a measure of the flux in the motor and thus ofthe voltage which is present at the machine in no-load condition depending on thespeed. The guided commissioning determines this value at about 30% of the Ratedcurrent 371. This current can be compared to the field current of an externally exciteddirect current machine.In order to optimize the sensor-less field-oriented control system, the machine has tobe operated without load at a rotational frequency which is below the Rated frequency375. The accuracy of the optimization increases with the adjusted Switching frequency400 and when the drive is in no-load operation. The flux-forming actual currentvalue Isd 215 to be read out should roughly match the set Rated magnetizingcurrent 716.The field-orientated control with speed sensor feedback uses the parameterized Ratedmagnetizing current 716 for the flux in the motor.The dependence of the magnetizing on the frequency and voltage at the correspondingnominal operating point in question is taken into account by a magnetizing characteristic.The characteristic is calculated via three points, in particular in the field weakeningrange above the rated frequency. The parameter identification has determinedthe magnetizing characteristic of the motor and set the parameters Magnetizing current50% 713, Magnetizing current 80% 713 and Magnetizing current 110% 713.ParameterSettingsNo. Description Min. Max. Fact. sett.713 Magnetizing current 50% Flux 1.00% 50.00% 31.00%714 Magnetizing current 80% Flux 1.00% 80.00% 65.00%715 Magnetizing current 110% Flux 110.00% 197.00% 145.00%716 Rated Magnetizing Current 0.01⋅I FIN o ⋅ I FIN 0.3⋅I FIN02/06 79