


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Improving the Operation Performance<br />
Reducing the Motor Speed Fluctuation (Slip Compensation Function)<br />
When the load is large, the motor slip also grows and the motor speed decreases. The slip compensation function<br />
keeps the motor speed constant, regardless of changes in load. When the motor is operating at the rated<br />
load, parameter E2-02 (Motor Rated Slip) × the slip compensation gain value in parameter C3-01 is added to<br />
the output frequency. The function can be used in V/f control or Open Loop Vector control.<br />
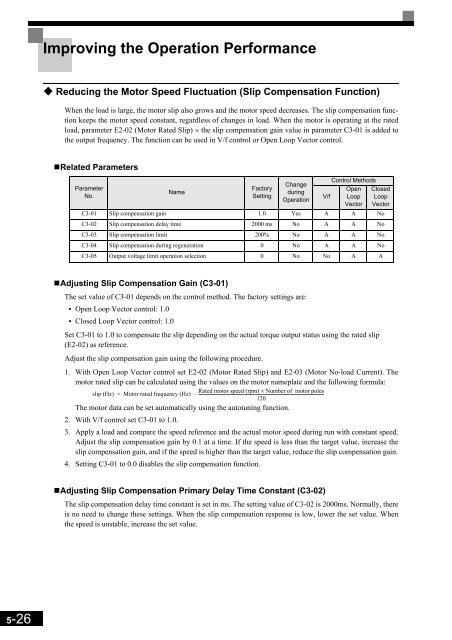
•Related Parameters<br />
Parameter<br />
No.<br />
Name<br />
Factory<br />
Setting<br />
Change<br />
during<br />
Operation<br />
V/f<br />
Control Methods<br />
Open<br />
Loop<br />
Vector<br />
Closed<br />
Loop<br />
Vector<br />
C3-01 Slip compensation gain 1.0 Yes A A No<br />
C3-02 Slip compensation delay time 2000 ms No A A No<br />
C3-03 Slip compensation limit 200% No A A No<br />
C3-04 Slip compensation during regeneration 0 No A A No<br />
C3-05 Output voltage limit operation selection 0 No No A A<br />
•Adjusting Slip Compensation Gain (C3-01)<br />
The set value of C3-01 depends on the control method. The factory settings are:<br />
• Open Loop Vector control: 1.0<br />
• Closed Loop Vector control: 1.0<br />
Set C3-01 to 1.0 to compensate the slip depending on the actual torque output status using the rated slip<br />
(E2-02) as reference.<br />
Adjust the slip compensation gain using the following procedure.<br />
1. With Open Loop Vector control set E2-02 (Motor Rated Slip) and E2-03 (Motor No-load Current). The<br />
motor rated slip can be calculated using the values on the motor nameplate and the following formula:<br />
Rated motor speed (rpm) × Number of motor poles<br />
slip (Hz) = Motor rated frequency (Hz) – ---------------------------------------------------------------------------------------------------------------------------<br />
120<br />
The motor data can be set automatically using the autotuning function.<br />
2. With V/f control set C3-01 to 1.0.<br />
3. Apply a load and compare the speed reference and the actual motor speed during run with constant speed.<br />
Adjust the slip compensation gain by 0.1 at a time. If the speed is less than the target value, increase the<br />
slip compensation gain, and if the speed is higher than the target value, reduce the slip compensation gain.<br />
4. Setting C3-01 to 0.0 disables the slip compensation function.<br />
•Adjusting Slip Compensation Primary Delay Time Constant (C3-02)<br />
The slip compensation delay time constant is set in ms. The setting value of C3-02 is 2000ms. Normally, there<br />
is no need to change these settings. When the slip compensation response is low, lower the set value. When<br />
the speed is unstable, increase the set value.<br />
5-26













