


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
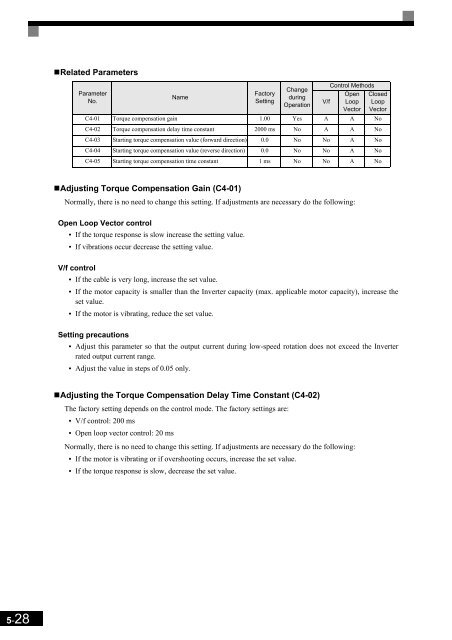
•Related Parameters<br />
Parameter<br />
No.<br />
Name<br />
Factory<br />
Setting<br />
Change<br />
during<br />
Operation<br />
V/f<br />
Control Methods<br />
Open<br />
Loop<br />
Vector<br />
Closed<br />
Loop<br />
Vector<br />
C4-01 Torque compensation gain 1.00 Yes A A No<br />
C4-02 Torque compensation delay time constant 2000 ms No A A No<br />
C4-03 Starting torque compensation value (forward direction) 0.0 No No A No<br />
C4-04 Starting torque compensation value (reverse direction) 0.0 No No A No<br />
C4-05 Starting torque compensation time constant 1 ms No No A No<br />
•Adjusting Torque Compensation Gain (C4-01)<br />
Normally, there is no need to change this setting. If adjustments are necessary do the following:<br />
Open Loop Vector control<br />
• If the torque response is slow increase the setting value.<br />
• If vibrations occur decrease the setting value.<br />
V/f control<br />
• If the cable is very long, increase the set value.<br />
• If the motor capacity is smaller than the Inverter capacity (max. applicable motor capacity), increase the<br />
set value.<br />
• If the motor is vibrating, reduce the set value.<br />
Setting precautions<br />
• Adjust this parameter so that the output current during low-speed rotation does not exceed the Inverter<br />
rated output current range.<br />
• Adjust the value in steps of 0.05 only.<br />
•Adjusting the Torque Compensation Delay Time Constant (C4-02)<br />
The factory setting depends on the control mode. The factory settings are:<br />
• V/f control: 200 ms<br />
• Open loop vector control: 20 ms<br />
Normally, there is no need to change this setting. If adjustments are necessary do the following:<br />
• If the motor is vibrating or if overshooting occurs, increase the set value.<br />
• If the torque response is slow, decrease the set value.<br />
5-28













