


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
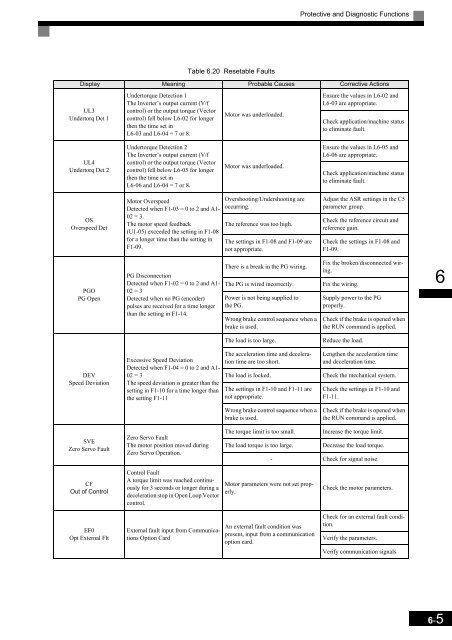
Protective and Diagnostic Functions<br />
Table 6.20 Resetable Faults<br />
Display Meaning Probable Causes Corrective Actions<br />
UL3<br />
Undertorq Det 1<br />
Undertorque Detection 1<br />
The Inverter’s output current (V/f<br />
control) or the output torque (Vector<br />
control) fell below L6-02 for longer<br />
then the time set in<br />
L6-03 and L6-04 = 7 or 8.<br />
Motor was underloaded.<br />
Ensure the values in L6-02 and<br />
L6-03 are appropriate.<br />
Check application/machine status<br />
to eliminate fault.<br />
UL4<br />
Undertorq Det 2<br />
Undertorque Detection 2<br />
The Inverter’s output current (V/f<br />
control) or the output torque (Vector<br />
control) fell below L6-05 for longer<br />
then the time set in<br />
L6-06 and L6-04 = 7 or 8.<br />
Motor was underloaded.<br />
Ensure the values in L6-05 and<br />
L6-06 are appropriate.<br />
Check application/machine status<br />
to eliminate fault.<br />
OS<br />
Overspeed Det<br />
Motor Overspeed<br />
Detected when F1-03 = 0 to 2 and A1-<br />
02 = 3.<br />
The motor speed feedback<br />
(U1-05) exceeded the setting in F1-08<br />
for a longer time than the setting in<br />
F1-09.<br />
Overshooting/Undershooting are<br />
occurring.<br />
The reference was too high.<br />
The settings in F1-08 and F1-09 are<br />
not appropriate.<br />
Adjust the ASR settings in the C5<br />
parameter group.<br />
Check the reference circuit and<br />
reference gain.<br />
Check the settings in F1-08 and<br />
F1-09.<br />
PGO<br />
PG Open<br />
PG Disconnection<br />
Detected when F1-02 = 0 to 2 and A1-<br />
02 = 3<br />
Detected when no PG (encoder)<br />
pulses are received for a time longer<br />
than the setting in F1-14.<br />
There is a break in the PG wiring.<br />
The PG is wired incorrectly.<br />
Power is not being supplied to<br />
the PG.<br />
Wrong brake control sequence when a<br />
brake is used.<br />
Fix the broken/disconnected wiring.<br />
Fix the wiring.<br />
Supply power to the PG<br />
properly.<br />
Check if the brake is opened when<br />
the RUN command is applied.<br />
6<br />
The load is too large.<br />
Reduce the load.<br />
DEV<br />
Speed Deviation<br />
Excessive Speed Deviation<br />
Detected when F1-04 = 0 to 2 and A1-<br />
02 = 3<br />
The speed deviation is greater than the<br />
setting in F1-10 for a time longer than<br />
the setting F1-11<br />
The acceleration time and deceleration<br />
time are too short.<br />
The load is locked.<br />
The settings in F1-10 and F1-11 are<br />
not appropriate.<br />
Lengthen the acceleration time<br />
and deceleration time.<br />
Check the mechanical system.<br />
Check the settings in F1-10 and<br />
F1-11.<br />
Wrong brake control sequence when a<br />
brake is used.<br />
Check if the brake is opened when<br />
the RUN command is applied.<br />
SVE<br />
Zero Servo Fault<br />
Zero Servo Fault<br />
The motor position moved during<br />
Zero Servo Operation.<br />
The torque limit is too small. Increase the torque limit.<br />
The load torque is too large. Decrease the load torque.<br />
- Check for signal noise.<br />
CF<br />
Out of Control<br />
Control Fault<br />
A torque limit was reached continuously<br />
for 3 seconds or longer during a<br />
deceleration stop in Open Loop Vector<br />
control.<br />
Motor parameters were not set properly.<br />
Check the motor parameters.<br />
EF0<br />
Opt External Flt<br />
External fault input from Communications<br />
Option Card<br />
An external fault condition was<br />
present, input from a communication<br />
option card.<br />
Check for an external fault condition.<br />
Verify the parameters.<br />
Verify communication signals<br />
6-5













