

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
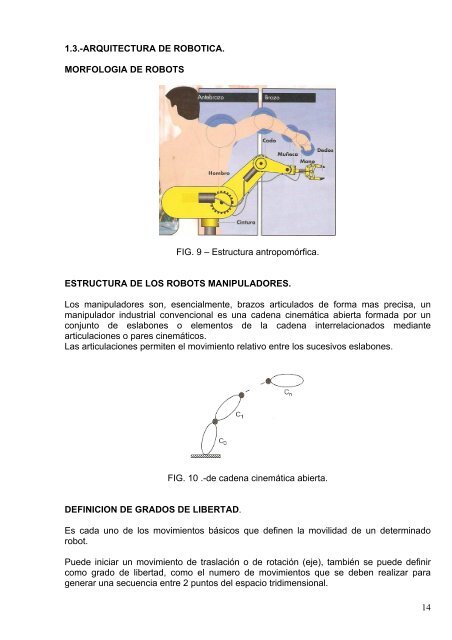
1.3.-ARQUITECTURA <strong>DE</strong> ROBOTICA.MORFOLOGIA <strong>DE</strong> ROBOTSFIG. 9 – Estructura antropomórfica.ESTRUCTURA <strong>DE</strong> LOS ROBOTS MANIPULADORES.Los manipuladores son, esencialmente, brazos articulados de forma mas precisa, unmanipulador industrial convencional es una cadena cinemática abierta formada por unconjunto de eslabones o elementos de la cadena interrelacionados mediantearticulaciones o pares cinemáticos.Las articulaciones permiten el movimiento relativo entre los sucesivos eslabones.FIG. 10 .-de cadena cinemática abierta.<strong>DE</strong>FINICION <strong>DE</strong> GRADOS <strong>DE</strong> LIBERTAD.Es cada uno de los movimientos básicos que definen la movilidad de un determinadorobot.Puede iniciar un movimiento de traslación o de rotación (eje), también se puede definircomo grado de libertad, como el numero de movimientos que se deben realizar paragenerar una secuencia entre 2 puntos del espacio tridimensional.14













