

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
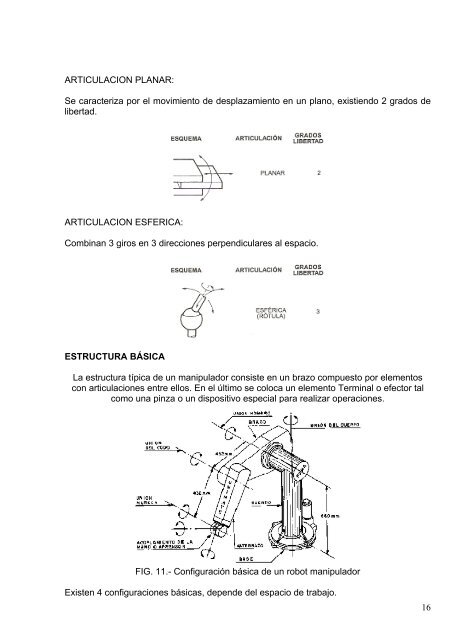
ARTICULACION PLANAR:Se caracteriza por el movimiento de desplazamiento en un plano, existiendo 2 grados delibertad.ARTICULACION ESFERICA:Combinan 3 giros en 3 direcciones perpendiculares al espacio.ESTRUCTURA BÁSICALa estructura típica de un manipulador consiste en un brazo compuesto por elementoscon articulaciones entre ellos. En el último se coloca un elemento Terminal o efector talcomo una pinza o un dispositivo especial para realizar operaciones.FIG. 11.- Configuración básica de un robot manipuladorExisten 4 configuraciones básicas, depende del espacio de trabajo.16













