

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
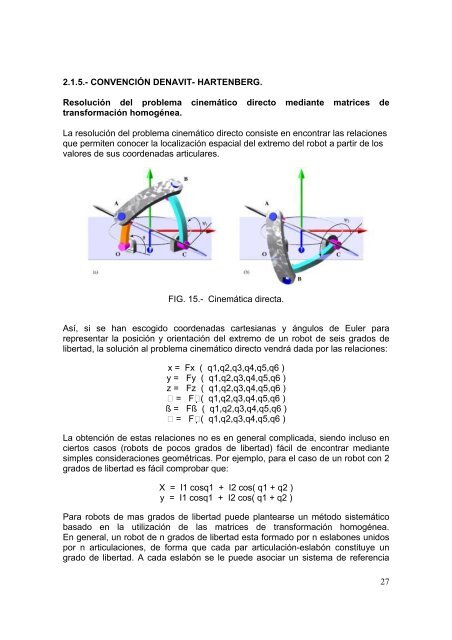
2.1.5.- CONVENCIÓN <strong>DE</strong>NAVIT- HARTENBERG.Resolución del problema cinemático directo mediante matrices detransformación homogénea.La resolución del problema cinemático directo consiste en encontrar las relacionesque permiten conocer la localización espacial del extremo del robot a partir de losvalores de sus coordenadas articulares.FIG. 15.- Cinemática directa.Así, si se han escogido coordenadas cartesianas y ángulos de Euler pararepresentar la posición y orientación del extremo de un robot de seis grados delibertad, la solución al problema cinemático directo vendrá dada por las relaciones:x = Fx ( q1,q2,q3,q4,q5,q6 )y = Fy ( q1,q2,q3,q4,q5,q6 )z = Fz ( q1,q2,q3,q4,q5,q6 ) = F( q1,q2,q3,q4,q5,q6 )ß = Fß ( q1,q2,q3,q4,q5,q6 ) = F( q1,q2,q3,q4,q5,q6 )La obtención de estas relaciones no es en general complicada, siendo incluso enciertos casos (robots de pocos grados de libertad) fácil de encontrar mediantesimples consideraciones geométricas. Por ejemplo, para el caso de un robot con 2grados de libertad es fácil comprobar que:X = I1 cosq1 + I2 cos( q1 + q2 )y = I1 cosq1 + I2 cos( q1 + q2 )Para robots de mas grados de libertad puede plantearse un método sistemáticobasado en la utilización de las matrices de transformación homogénea.En general, un robot de n grados de libertad esta formado por n eslabones unidospor n articulaciones, de forma que cada par articulación-eslabón constituye ungrado de libertad. A cada eslabón se le puede asociar un sistema de referencia27













