

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
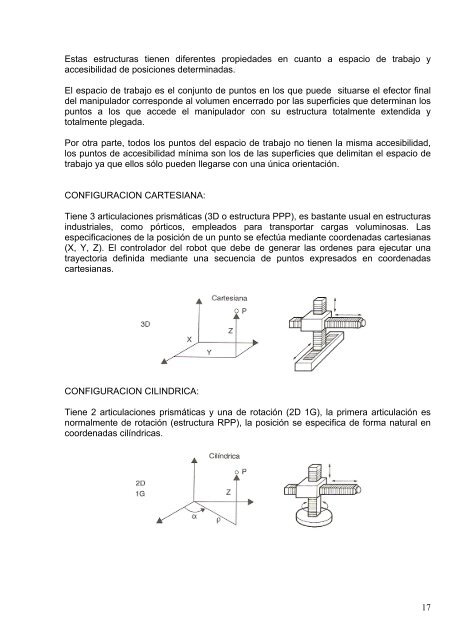
Estas estructuras tienen diferentes propiedades en cuanto a espacio de trabajo yaccesibilidad de posiciones determinadas.El espacio de trabajo es el conjunto de puntos en los que puede situarse el efector finaldel manipulador corresponde al volumen encerrado por las superficies que determinan lospuntos a los que accede el manipulador con su estructura totalmente extendida ytotalmente plegada.Por otra parte, todos los puntos del espacio de trabajo no tienen la misma accesibilidad,los puntos de accesibilidad mínima son los de las superficies que delimitan el espacio detrabajo ya que ellos sólo pueden llegarse con una única orientación.CONFIGURACION CARTESIANA:Tiene 3 articulaciones prismáticas (3D o estructura PPP), es bastante usual en estructurasindustriales, como pórticos, empleados para transportar cargas voluminosas. Lasespecificaciones de la posición de un punto se efectúa mediante coordenadas cartesianas(X, Y, Z). El controlador del robot que debe de generar las ordenes para ejecutar unatrayectoria definida mediante una secuencia de puntos expresados en coordenadascartesianas.CONFIGURACION CILINDRICA:Tiene 2 articulaciones prismáticas y una de rotación (2D 1G), la primera articulación esnormalmente de rotación (estructura RPP), la posición se especifica de forma natural encoordenadas cilíndricas.17













