

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
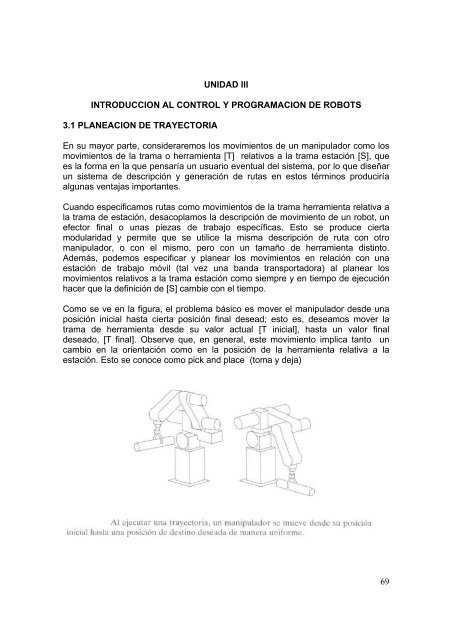
UNIDAD IIIINTRODUCCION AL CONTROL Y PROGRAMACION <strong>DE</strong> ROBOTS3.1 PLANEACION <strong>DE</strong> TRAYECTORIAEn su mayor parte, consideraremos los movimientos de un manipulador como losmovimientos de la trama o herramienta [T] relativos a la trama estación [S], quees la forma en la que pensaría un usuario eventual del sistema, por lo que diseñarun sistema de descripción y generación de rutas en estos términos produciríaalgunas ventajas importantes.Cuando especificamos rutas como movimientos de la trama herramienta relativa ala trama de estación, desacoplamos la descripción de movimiento de un robot, unefector final o unas piezas de trabajo específicas. Esto se produce ciertamodularidad y permite que se utilice la misma descripción de ruta con otromanipulador, o con el mismo, pero con un tamaño de herramienta distinto.Además, podemos especificar y planear los movimientos en relación con unaestación de trabajo móvil (tal vez una banda transportadora) al planear losmovimientos relativos a la trama estación como siempre y en tiempo de ejecuciónhacer que la definición de [S] cambie con el tiempo.Como se ve en la figura, el problema básico es mover el manipulador desde unaposición inicial hasta cierta posición final desead; esto es, deseamos mover latrama de herramienta desde su valor actual [T inicial], hasta un valor finaldeseado, [T final]. Observe que, en general, este movimiento implica tanto uncambio en la orientación como en la posición de la herramienta relativa a laestación. Esto se conoce como pick and place (toma y deja)69













