

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
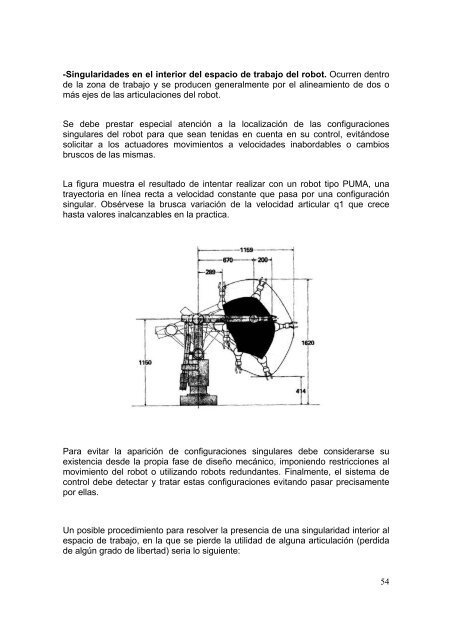
-Singularidades en el interior del espacio de trabajo del robot. Ocurren dentrode la zona de trabajo y se producen generalmente por el alineamiento de dos omás ejes de las articulaciones del robot.Se debe prestar especial atención a la localización de las configuracionessingulares del robot para que sean tenidas en cuenta en su control, evitándosesolicitar a los actuadores movimientos a velocidades inabordables o cambiosbruscos de las mismas.La figura muestra el resultado de intentar realizar con un robot tipo PUMA, unatrayectoria en línea recta a velocidad constante que pasa por una configuraciónsingular. Obsérvese la brusca variación de la velocidad articular q1 que crecehasta valores inalcanzables en la practica.Para evitar la aparición de configuraciones singulares debe considerarse suexistencia desde la propia fase de diseño mecánico, imponiendo restricciones almovimiento del robot o utilizando robots redundantes. Finalmente, el sistema decontrol debe detectar y tratar estas configuraciones evitando pasar precisamentepor ellas.Un posible procedimiento para resolver la presencia de una singularidad interior alespacio de trabajo, en la que se pierde la utilidad de alguna articulación (perdidade algún grado de libertad) seria lo siguiente:54













