

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
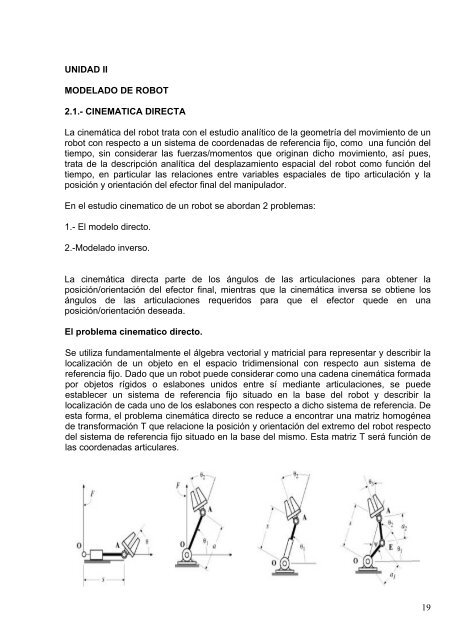
UNIDAD IIMO<strong>DE</strong>LADO <strong>DE</strong> ROBOT2.1.- CINEMATICA DIRECTALa cinemática del robot trata con el estudio analítico de la geometría del movimiento de unrobot con respecto a un sistema de coordenadas de referencia fijo, como una función deltiempo, sin considerar las fuerzas/momentos que originan dicho movimiento, así pues,trata de la descripción analítica del desplazamiento espacial del robot como función deltiempo, en particular las relaciones entre variables espaciales de tipo articulación y laposición y orientación del efector final del manipulador.En el estudio cinematico de un robot se abordan 2 problemas:1.- El modelo directo.2.-Modelado inverso.La cinemática directa parte de los ángulos de las articulaciones para obtener laposición/orientación del efector final, mientras que la cinemática inversa se obtiene losángulos de las articulaciones requeridos para que el efector quede en unaposición/orientación deseada.El problema cinematico directo.Se utiliza fundamentalmente el álgebra vectorial y matricial para representar y describir lalocalización de un objeto en el espacio tridimensional con respecto aun sistema dereferencia fijo. Dado que un robot puede considerar como una cadena cinemática formadapor objetos rígidos o eslabones unidos entre sí mediante articulaciones, se puedeestablecer un sistema de referencia fijo situado en la base del robot y describir lalocalización de cada uno de los eslabones con respecto a dicho sistema de referencia. Deesta forma, el problema cinemática directo se reduce a encontrar una matriz homogéneade transformación T que relacione la posición y orientación del extremo del robot respectodel sistema de referencia fijo situado en la base del mismo. Esta matriz T será función delas coordenadas articulares.19













