

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
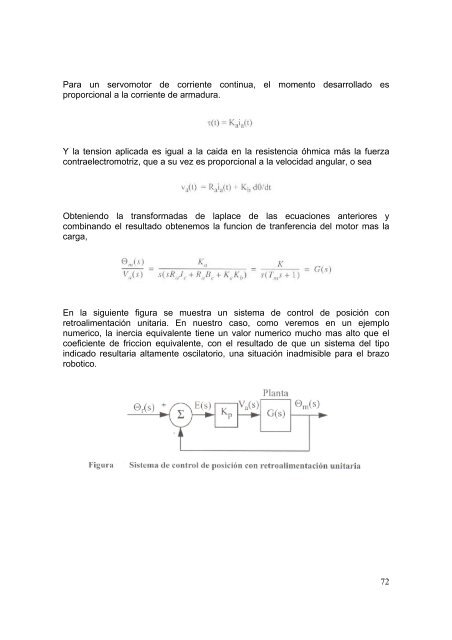
Para un servomotor de corriente continua, el momento desarrollado esproporcional a la corriente de armadura.Y la tension aplicada es igual a la caida en la resistencia óhmica más la fuerzacontraelectromotriz, que a su vez es proporcional a la velocidad angular, o seaObteniendo la transformadas de laplace de las ecuaciones anteriores ycombinando el resultado obtenemos la funcion de tranferencia del motor mas lacarga,En la siguiente figura se muestra un sistema de control de posición conretroalimentación unitaria. En nuestro caso, como veremos en un ejemplonumerico, la inercia equivalente tiene un valor numerico mucho mas alto que elcoeficiente de friccion equivalente, con el resultado de que un sistema del tipoindicado resultaria altamente oscilatorio, una situación inadmisible para el brazorobotico.72













