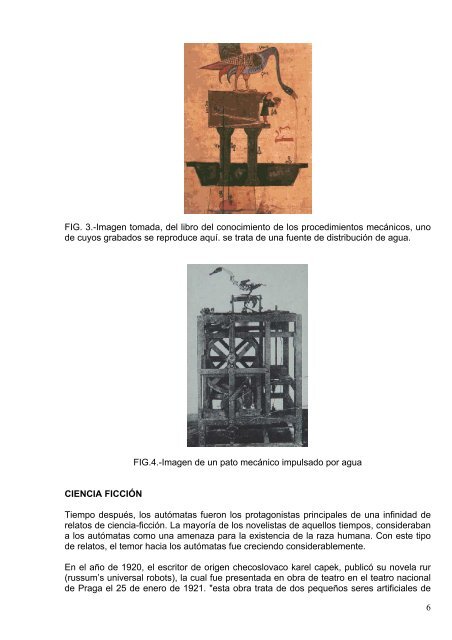
FIG. 3.-Imagen tomada, del libro del conocimiento de los procedimientos mecánicos, unode cuyos grabados se reproduce aquí. se trata de una fuente de distribución de agua.FIG.4.-Imagen de un pato mecánico impulsado por aguaCIENCIA FICCIÓNTiempo después, los autómatas fueron los protagonistas principales de una infinidad derelatos de ciencia-ficción. La mayoría de los novelistas de aquellos tiempos, considerabana los autómatas como una amenaza para la existencia de la raza humana. Con este tipode relatos, el temor hacia los autómatas fue creciendo considerablemente.En el año de 1920, el escritor de origen checoslovaco karel capek, publicó su novela rur(russum’s universal robots), la cual fue presentada en obra de teatro en el teatro nacionalde Praga el 25 de enero de 1921. "esta obra trata de dos pequeños seres artificiales de6
forma humana que responden perfectamente a las órdenes de su creador, aunque al finalacaban rebelándose contra él." para referirse a estos seres, el autor les llamaba robots,derivación del vocablo checo robota, que significa "trabajo obligatorio". Y es así comosurge la palabra robot para referirse a los autómatas mecánicos de aquellas épocas. Y apartir de esta novela, se les llama robots a los autómatas.Existe un miedo a los robots debido a la evolución tan acelerada que se ha proyectado enmuchas de las novelas de ciencia-ficción. Y aunque muchas de estas novelas no estántan fuera de la realidad, no hay por que tenerles pavor al desarrollo de robots, sino todo locontrario, ya que estos existen para poder facilitar las tareas de los humanos. En la obrade Isaac Asimov, yo robot publicada en 1940, postula tres leyes que los robots deberánde seguir:• UN ROBOT NO <strong>DE</strong>BE DAÑAR A UN SER HUMANO O, POR SU INACCIÓN,<strong>DE</strong>JAR QUE UN SER HUMANO SUFRA DAÑO.• UN ROBOT <strong>DE</strong>BE OBE<strong>DE</strong>CER LAS ÓR<strong>DE</strong>NES QUE LE SON DADAS POR UNSER HUMANO, EXCEPTO CUANDO ESTAS ÓR<strong>DE</strong>NES ESTÁN ENCONTRADICCIÓN CON LA PRIMERA LEY.• UN ROBOT <strong>DE</strong>BE PROTEGER SU PROPIA EXISTENCIA, HASTA DON<strong>DE</strong> ESTAPROTECCIÓN NO ENTRE EN CONFLICTO CON LA PRIMERA O SEGUNDALEY.FIG.5 .- ISAAC ASIMOVAún después de esta publicación de Isaac Asimov, los novelistas seguían cuestionándoseen sus obras acerca de la naturaleza de un robot, tienen la idea de que algún día, elhombre será esclavo de las máquinas, esta idea la plasman en sus novelas; como porejemplo la novela de jack williamson en con las manos cruzadas, se muestra como es quela libertad humana se esclaviza por unos robots eficientes que cumplen todas las órdenesque se les dan.Una de las primeras películas que tratan el tema de la robótica es la titulada "metrópolis",la cual trata de un robot femenino que posee inteligencia propia, obedece todas lasordenes de su creador, y aunque es una película antigua, es un buen ejemplo de comoveían a los robots en aquellas épocas.7
- Page 1 and 2: INSTITUTO TECNOLÒGICO DE MAZATLANP
- Page 3 and 4: UNIDAD IINTRODUCCION Y CONCEPTOS DE
- Page 5: FIG 2.-Jacques de Vaucanson, constr
- Page 9: FIG.8 .- robots de series de TV, BE
- Page 12 and 13: Las características con las que se
- Page 14 and 15: 1.3.-ARQUITECTURA DE ROBOTICA.MORFO
- Page 16 and 17: ARTICULACION PLANAR:Se caracteriza
- Page 18 and 19: CONFIGURACION POLAR:Esta configurac
- Page 20 and 21: FIG.12 .- Cinemática directa.Un si
- Page 22 and 23: 2.1.4.-TRANSFORMACIÒN HOMOGENEA.Un
- Page 24 and 25: Estas tres transformaciones permite
- Page 26 and 27: Mediante la integración de las mat
- Page 28 and 29: solidario a el y, utilizando las tr
- Page 30 and 31: Donde θi, ai, di, αi, son los par
- Page 32 and 33: coordenadas (i-1)- esimo hasta la i
- Page 34 and 35: 2.1.6. - CINEMATICA DE MANIPULADORE
- Page 36 and 37: Y esta girando respecto al sistema
- Page 38 and 39: 1. En muchas aplicaciones, el probl
- Page 40 and 41: 2.2.- DINAMICA DEL ROBOT.Antes de e
- Page 42 and 43: Resolución del problema cinematico
- Page 44 and 45: Sin embargo, este procedimiento dir
- Page 46 and 47: S1 ( Px ) - C1 ( Py ) = 0tan( q1 )
- Page 48 and 49: El punto central de la muñeca del
- Page 50 and 51: Matriz Jacobiana.El modelado cinema
- Page 52 and 53: matriz encontrar la relación inver
- Page 54 and 55: -Singularidades en el interior del
- Page 56 and 57:
FIG. 24.- Modelo dinámico.Esta rel
- Page 58 and 59:
En donde se ha supuesto que toda la
- Page 60 and 61:
Ji =X² dm XiYi dm XiZi dm Xi dmYiX
- Page 62 and 63:
la formulación recursiva de Newton
- Page 64 and 65:
2.2.3.- MODELO DINAMICO DE ESTRUCTU
- Page 66 and 67:
FIG. 27.-Diagrama a bloques del sis
- Page 68 and 69:
El dispositivo electrónico de mand
- Page 70 and 71:
3.2.- EL PROBLEMA DE CONTROLCon el
- Page 72 and 73:
Para un servomotor de corriente con
- Page 74 and 75:
3.3.3. CONTROL CENTRALIZADOEl contr
- Page 77 and 78:
3.4.1. PROGRAMACION DIRECTA.Robot d
- Page 84 and 85:
UNIDAD IVACTUADORES Y SENSORES4.1.-
- Page 86 and 87:
Actuadores neumáticos.En ellos la
- Page 88 and 89:
4.1.1 TRANSMISIONES.Transmisiones y
- Page 90 and 91:
circular tanto a la entrada como a
- Page 94:
4.1.2. SERVOMOTORES.Un Servo es un
- Page 99 and 100:
¿Cómo se debe comunicar el ángul
- Page 101 and 102:
101
- Page 103 and 104:
103
- Page 105 and 106:
105
- Page 107 and 108:
107
- Page 109 and 110:
109
- Page 111 and 112:
111
- Page 113 and 114:
113
- Page 115 and 116:
115
- Page 117 and 118:
117
- Page 119 and 120:
119
- Page 121 and 122:
121
- Page 123 and 124:
123
- Page 125 and 126:
125
- Page 127 and 128:
127
- Page 129 and 130:
129
- Page 131 and 132:
131
- Page 133 and 134:
133
- Page 135 and 136:
135
- Page 137 and 138:
137
- Page 139 and 140:
MOTORES PAP139
- Page 141 and 142:
141
- Page 143 and 144:
143
- Page 145 and 146:
145
- Page 147 and 148:
147
- Page 149 and 150:
149
- Page 151 and 152:
151
- Page 153 and 154:
153
- Page 155 and 156:
155
- Page 157 and 158:
157
- Page 159 and 160:
159
- Page 161 and 162:
161
- Page 163 and 164:
163
- Page 165 and 166:
165
- Page 167 and 168:
167
- Page 169 and 170:
ango de valores (haciendo uso de se
- Page 171 and 172:
Magnitudes físicas que es necesari
- Page 173 and 174:
oReceptores de radiobalizas• Sens
- Page 175 and 176:
Los tacómetros de pulsos (a los qu
- Page 177 and 178:
4.3.2. SENSORES DE FUERZAEn este ar
- Page 179 and 180:
Curva de resistencia (para 100 lb)P
- Page 181 and 182:
Medición de 2,12 MegomhsEstos sens
- Page 183 and 184:
4.3.3. SENSORES DE VISIONCCD y cám
- Page 185 and 186:
185
- Page 187 and 188:
187
- Page 189 and 190:
189
- Page 191 and 192:
191
- Page 193 and 194:
193
- Page 195 and 196:
195
- Page 197:
197