

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
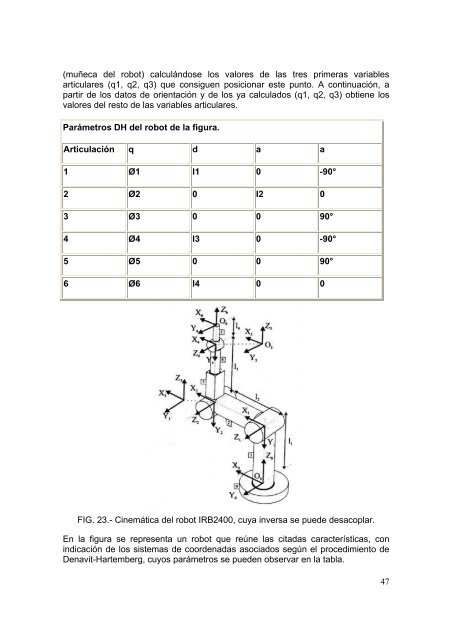
(muñeca del robot) calculándose los valores de las tres primeras variablesarticulares (q1, q2, q3) que consiguen posicionar este punto. A continuación, apartir de los datos de orientación y de los ya calculados (q1, q2, q3) obtiene losvalores del resto de las variables articulares.Parámetros DH del robot de la figura.Articulación q d a a1 Ø1 I1 0 -90°2 Ø2 0 I2 03 Ø3 0 0 90°4 Ø4 I3 0 -90°5 Ø5 0 0 90°6 Ø6 I4 0 0FIG. 23.- Cinemática del robot IRB2400, cuya inversa se puede desacoplar.En la figura se representa un robot que reúne las citadas características, conindicación de los sistemas de coordenadas asociados según el procedimiento deDenavit-Hartemberg, cuyos parámetros se pueden observar en la tabla.47













