

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
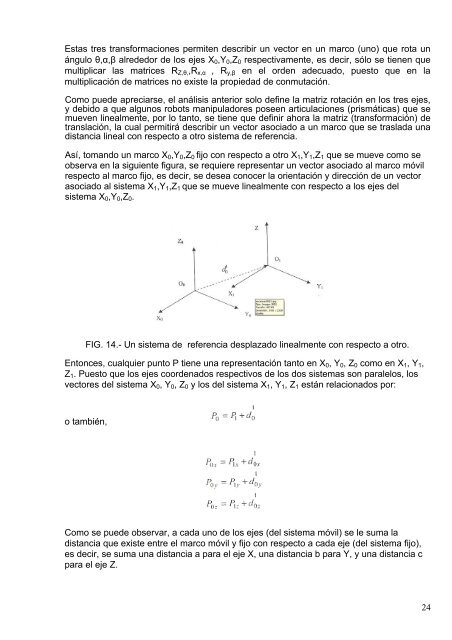
Estas tres transformaciones permiten describir un vector en un marco (uno) que rota unángulo θ,α,β alrededor de los ejes X 0 ,Y 0 ,Z 0 respectivamente, es decir, sólo se tienen quemultiplicar las matrices R Z,θ, ,R x,α , R y,β en el orden adecuado, puesto que en lamultiplicación de matrices no existe la propiedad de conmutación.Como puede apreciarse, el análisis anterior solo define la matriz rotación en los tres ejes,y debido a que algunos robots manipuladores poseen articulaciones (prismáticas) que semueven linealmente, por lo tanto, se tiene que definir ahora la matriz (transformación) detranslación, la cual permitirá describir un vector asociado a un marco que se traslada unadistancia lineal con respecto a otro sistema de referencia.Así, tomando un marco X 0 ,Y 0 ,Z 0 fijo con respecto a otro X 1 ,Y 1 ,Z 1 que se mueve como seobserva en la siguiente figura, se requiere representar un vector asociado al marco móvilrespecto al marco fijo, es decir, se desea conocer la orientación y dirección de un vectorasociado al sistema X 1 ,Y 1 ,Z 1 que se mueve linealmente con respecto a los ejes delsistema X 0 ,Y 0 ,Z 0 .FIG. 14.- Un sistema de referencia desplazado linealmente con respecto a otro.Entonces, cualquier punto P tiene una representación tanto en X 0 , Y 0 , Z 0 como en X 1 , Y 1 ,Z 1 . Puesto que los ejes coordenados respectivos de los dos sistemas son paralelos, losvectores del sistema X 0 , Y 0 , Z 0 y los del sistema X 1 , Y 1 , Z 1 están relacionados por:o también,Como se puede observar, a cada uno de los ejes (del sistema móvil) se le suma ladistancia que existe entre el marco móvil y fijo con respecto a cada eje (del sistema fijo),es decir, se suma una distancia a para el eje X, una distancia b para Y, y una distancia cpara el eje Z.24













