

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
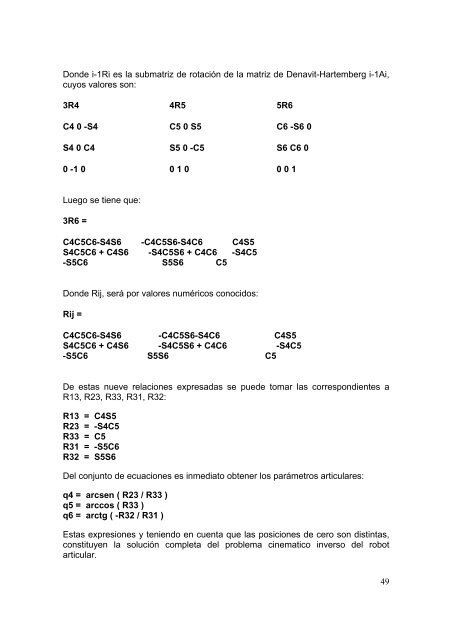
Donde i-1Ri es la submatriz de rotación de la matriz de Denavit-Hartemberg i-1Ai,cuyos valores son:3R4 4R5 5R6C4 0 -S4 C5 0 S5 C6 -S6 0S4 0 C4 S5 0 -C5 S6 C6 00 -1 0 0 1 0 0 0 1Luego se tiene que:3R6 =C4C5C6-S4S6 -C4C5S6-S4C6 C4S5S4C5C6 + C4S6 -S4C5S6 + C4C6 -S4C5-S5C6 S5S6 C5Donde Rij, será por valores numéricos conocidos:Rij =C4C5C6-S4S6 -C4C5S6-S4C6 C4S5S4C5C6 + C4S6 -S4C5S6 + C4C6 -S4C5-S5C6 S5S6 C5De estas nueve relaciones expresadas se puede tomar las correspondientes aR13, R23, R33, R31, R32:R13 = C4S5R23 = -S4C5R33 = C5R31 = -S5C6R32 = S5S6Del conjunto de ecuaciones es inmediato obtener los parámetros articulares:q4 = arcsen ( R23 / R33 )q5 = arccos ( R33 )q6 = arctg ( -R32 / R31 )Estas expresiones y teniendo en cuenta que las posiciones de cero son distintas,constituyen la solución completa del problema cinematico inverso del robotarticular.49













