

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
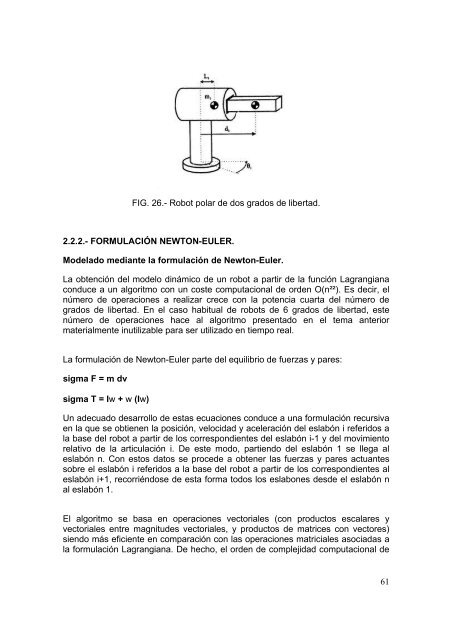
FIG. 26.- Robot polar de dos grados de libertad.2.2.2.- FORMULACIÓN NEWTON-EULER.Modelado mediante la formulación de Newton-Euler.La obtención del modelo dinámico de un robot a partir de la función Lagrangianaconduce a un algoritmo con un coste computacional de orden O(n²²). Es decir, elnúmero de operaciones a realizar crece con la potencia cuarta del número degrados de libertad. En el caso habitual de robots de 6 grados de libertad, estenúmero de operaciones hace al algoritmo presentado en el tema anteriormaterialmente inutilizable para ser utilizado en tiempo real.La formulación de Newton-Euler parte del equilibrio de fuerzas y pares:sigma F = m dvsigma T = Iw + w (Iw)Un adecuado desarrollo de estas ecuaciones conduce a una formulación recursivaen la que se obtienen la posición, velocidad y aceleración del eslabón i referidos ala base del robot a partir de los correspondientes del eslabón i-1 y del movimientorelativo de la articulación i. De este modo, partiendo del eslabón 1 se llega aleslabón n. Con estos datos se procede a obtener las fuerzas y pares actuantessobre el eslabón i referidos a la base del robot a partir de los correspondientes aleslabón i+1, recorriéndose de esta forma todos los eslabones desde el eslabón nal eslabón 1.El algoritmo se basa en operaciones vectoriales (con productos escalares yvectoriales entre magnitudes vectoriales, y productos de matrices con vectores)siendo más eficiente en comparación con las operaciones matriciales asociadas ala formulación Lagrangiana. De hecho, el orden de complejidad computacional de61













