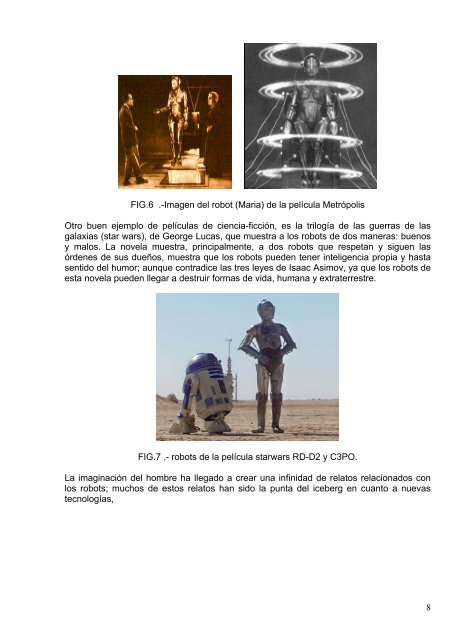
FIG.6 .-Imagen del robot (Maria) de la película MetrópolisOtro buen ejemplo de películas de ciencia-ficción, es la trilogía de las guerras de lasgalaxias (star wars), de George Lucas, que muestra a los robots de dos maneras: buenosy malos. La novela muestra, principalmente, a dos robots que respetan y siguen lasórdenes de sus dueños, muestra que los robots pueden tener inteligencia propia y hastasentido del humor; aunque contradice las tres leyes de Isaac Asimov, ya que los robots deesta novela pueden llegar a destruir formas de vida, humana y extraterrestre.FIG.7 .- robots de la película starwars RD-D2 y C3PO.La imaginación del hombre ha llegado a crear una infinidad de relatos relacionados conlos robots; muchos de estos relatos han sido la punta del iceberg en cuanto a nuevastecnologías,8
FIG.8 .- robots de series de TV, BEN<strong>DE</strong>R Y ROBBYun ejemplo de ello son las novelas de julio verne, en especial la llamada "viaje a la luna"en donde relata con lujo de detalle como es que tres hombres podrían llegar a la luna, y apesar de que eran relatos de ciencia-ficción, estas novelas no están tan fuera de larealidad que hoy vivimos.1.2.-AREAS <strong>DE</strong> LA APLICACIÓN <strong>DE</strong> LA ROBOTICA.La robótica, recordemos, que es una área interdisciplinaria formada por la ingenieríamecánica, eléctrica, electrónica y sistemas computacionales. La mecánica comprendetres aspectos: diseño mecánico de la máquina, análisis estático y análisis dinámico. Lamicroelectrónica le permite al robot trasmitir la información que se le entrega, coordinandoimpulsos eléctricos que hacen que el robot realice los movimientos requeridos por latarea. La informática provee de los programas necesarios para lograr la coordinaciónmecánica requerida en los movimientos del robot, dar un cierto grado de inteligencia a lamáquina, es decir adaptabilidad, autonomía y capacidad interpretativa y correctiva.El término de robótica inteligente combina cierta destreza física de locomoción ymanipulación, que caracteriza a lo que conocemos como robot, con habilidades depercepción y de razonamiento residentes en una computadora. La locomoción ymanipulación están directamente relacionadas con los componentes mecánicos de unrobot. La percepción está directamente relacionada con dispositivos que proporcionaninformación del medio ambiente (sensores); estos dispositivos pueden ser de tipoultrasonido (radares), cámaras de visión, láseres, infrarrojos, por mencionar algunos. Losprocesos de razonamiento seleccionan las acciones que se deben tomar para realizarcierta tarea encomendada. La habilidad de razonamiento permite el acoplamiento naturalentre las habilidades de percepción y acción.La robótica en la actualidad tiene dos ramas: una que trata con ambientes preparados(industriales) y la otra que trata con ambientes no estructurados y no predecibles(submarinos, catástrofes y el espacio). En algún tiempo se pensó erróneamente que senecesitaría de un gran desarrollo en sensado, percepción y razonamiento aún para robotsindustriales.9