

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
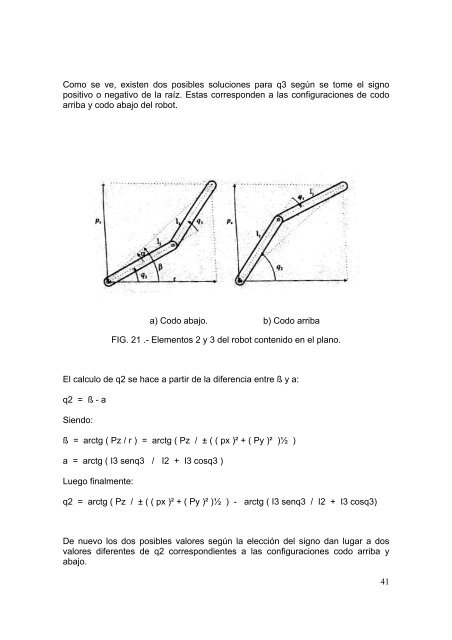
Como se ve, existen dos posibles soluciones para q3 según se tome el signopositivo o negativo de la raíz. Estas corresponden a las configuraciones de codoarriba y codo abajo del robot.a) Codo abajo. b) Codo arribaFIG. 21 .- Elementos 2 y 3 del robot contenido en el plano.El calculo de q2 se hace a partir de la diferencia entre ß y a:q2 = ß - aSiendo:ß = arctg ( Pz / r ) = arctg ( Pz / ± ( ( px )² + ( Py )² )½ )a = arctg ( I3 senq3 / I2 + I3 cosq3 )Luego finalmente:q2 = arctg ( Pz / ± ( ( px )² + ( Py )² )½ ) - arctg ( I3 senq3 / I2 + I3 cosq3)De nuevo los dos posibles valores según la elección del signo dan lugar a dosvalores diferentes de q2 correspondientes a las configuraciones codo arriba yabajo.41













