

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
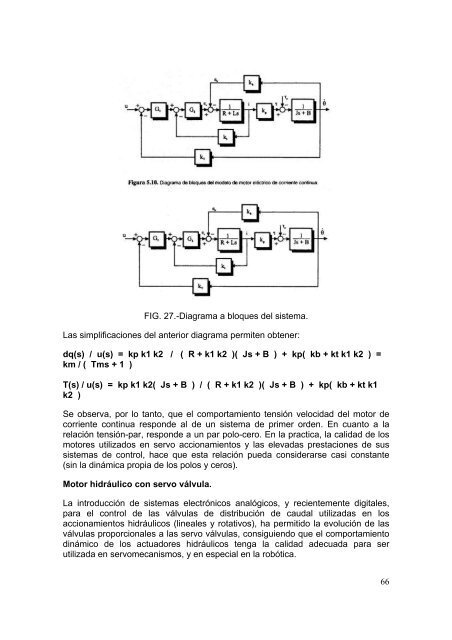
FIG. 27.-Diagrama a bloques del sistema.Las simplificaciones del anterior diagrama permiten obtener:dq(s) / u(s) = kp k1 k2 / ( R + k1 k2 )( Js + B ) + kp( kb + kt k1 k2 ) =km / ( Tms + 1 )T(s) / u(s) = kp k1 k2( Js + B ) / ( R + k1 k2 )( Js + B ) + kp( kb + kt k1k2 )Se observa, por lo tanto, que el comportamiento tensión velocidad del motor decorriente continua responde al de un sistema de primer orden. En cuanto a larelación tensión-par, responde a un par polo-cero. En la practica, la calidad de losmotores utilizados en servo accionamientos y las elevadas prestaciones de sussistemas de control, hace que esta relación pueda considerarse casi constante(sin la dinámica propia de los polos y ceros).Motor hidráulico con servo válvula.La introducción de sistemas electrónicos analógicos, y recientemente digitales,para el control de las válvulas de distribución de caudal utilizadas en losaccionamientos hidráulicos (lineales y rotativos), ha permitido la evolución de lasválvulas proporcionales a las servo válvulas, consiguiendo que el comportamientodinámico de los actuadores hidráulicos tenga la calidad adecuada para serutilizada en servomecanismos, y en especial en la robótica.66













