

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
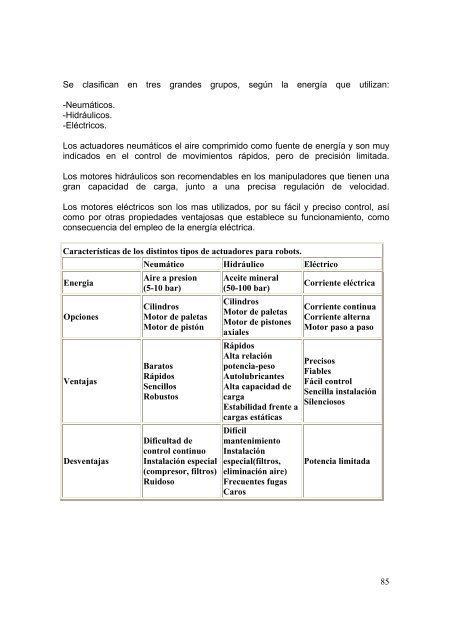
Se clasifican en tres grandes grupos, según la energía que utilizan:-Neumáticos.-Hidráulicos.-Eléctricos.Los actuadores neumáticos el aire comprimido como fuente de energía y son muyindicados en el control de movimientos rápidos, pero de precisión limitada.Los motores hidráulicos son recomendables en los manipuladores que tienen unagran capacidad de carga, junto a una precisa regulación de velocidad.Los motores eléctricos son los mas utilizados, por su fácil y preciso control, asícomo por otras propiedades ventajosas que establece su funcionamiento, comoconsecuencia del empleo de la energía eléctrica.Características de los distintos tipos de actuadores para robots.Neumático Hidráulico EléctricoEnergiaOpcionesVentajasDesventajasAire a presion(5-10 bar)CilindrosMotor de paletasMotor de pistónBaratosRápidosSencillosRobustosDificultad decontrol continuoInstalación especial(compresor, filtros)RuidosoAceite mineral(50-100 bar)CilindrosMotor de paletasMotor de pistonesaxialesRápidosAlta relaciónpotencia-pesoAutolubricantesAlta capacidad decargaEstabilidad frente acargas estáticasDifícilmantenimientoInstalaciónespecial(filtros,eliminación aire)Frecuentes fugasCarosCorriente eléctricaCorriente continuaCorriente alternaMotor paso a pasoPrecisosFiablesFácil controlSencilla instalaciónSilenciososPotencia limitada85













