

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
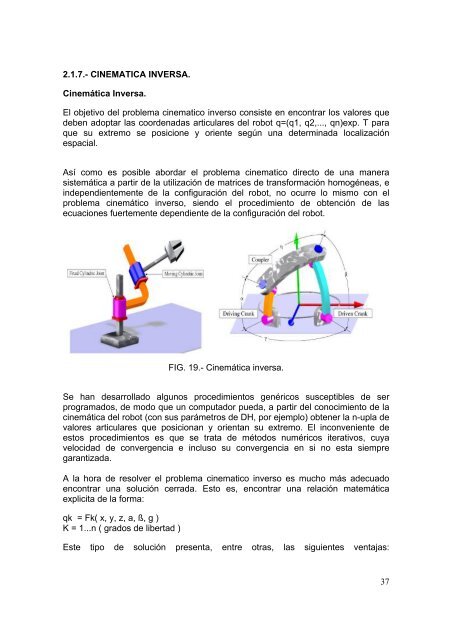
2.1.7.- CINEMATICA INVERSA.Cinemática Inversa.El objetivo del problema cinematico inverso consiste en encontrar los valores quedeben adoptar las coordenadas articulares del robot q=(q1, q2,..., qn)exp. T paraque su extremo se posicione y oriente según una determinada localizaciónespacial.Así como es posible abordar el problema cinematico directo de una manerasistemática a partir de la utilización de matrices de transformación homogéneas, eindependientemente de la configuración del robot, no ocurre lo mismo con elproblema cinemático inverso, siendo el procedimiento de obtención de lasecuaciones fuertemente dependiente de la configuración del robot.FIG. 19.- Cinemática inversa.Se han desarrollado algunos procedimientos genéricos susceptibles de serprogramados, de modo que un computador pueda, a partir del conocimiento de lacinemática del robot (con sus parámetros de DH, por ejemplo) obtener la n-upla devalores articulares que posicionan y orientan su extremo. El inconveniente deestos procedimientos es que se trata de métodos numéricos iterativos, cuyavelocidad de convergencia e incluso su convergencia en si no esta siempregarantizada.A la hora de resolver el problema cinematico inverso es mucho más adecuadoencontrar una solución cerrada. Esto es, encontrar una relación matemáticaexplicita de la forma:qk = Fk( x, y, z, a, ß, g )K = 1...n ( grados de libertad )Este tipo de solución presenta, entre otras, las siguientes ventajas:37













