

INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul
INSTITUTO TECNOLÃGICO DE MAZATLAN - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
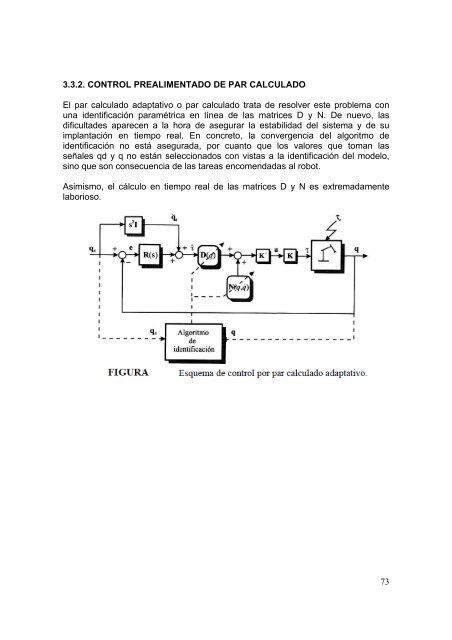
3.3.2. CONTROL PREALIMENTADO <strong>DE</strong> PAR CALCULADOEl par calculado adaptativo o par calculado trata de resolver este problema conuna identificación paramétrica en línea de las matrices D y N. De nuevo, lasdificultades aparecen a la hora de asegurar la estabilidad del sistema y de suimplantación en tiempo real. En concreto, la convergencia del algoritmo deidentificación no está asegurada, por cuanto que los valores que toman lasseñales qd y q no están seleccionados con vistas a la identificación del modelo,sino que son consecuencia de las tareas encomendadas al robot.Asimismo, el cálculo en tiempo real de las matrices D y N es extremadamentelaborioso.73













