

Modélisation du processus de pilotage d'un atelier - Les thèses en ...
Modélisation du processus de pilotage d'un atelier - Les thèses en ...
Modélisation du processus de pilotage d'un atelier - Les thèses en ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Partie I : Pilotage <strong>de</strong>s systèmes <strong>de</strong> pro<strong>du</strong>ction<br />
[Le Moigne, 1974] intro<strong>du</strong>it la séparation <strong>en</strong>tre système physique, système<br />
d’information et système <strong>de</strong> décision. Pour lui, le <strong>pilotage</strong> concerne la définition et<br />
l’organisation <strong>de</strong>s relations <strong>en</strong>tre sous-système physique et sous-système <strong>de</strong> décision, ainsi<br />
que l’organisation <strong>de</strong>s activités liées à la prise <strong>de</strong> décision. Dans les systèmes <strong>de</strong> pro<strong>du</strong>ction,<br />
ceci in<strong>du</strong>it une notion <strong>de</strong> boucle fermée : une activité n’est réellem<strong>en</strong>t décisionnelle que s’il<br />
existe une boucle <strong>de</strong> rétroaction <strong>en</strong>tre le système physique et le système décisionnel. Ceci va<br />
permettre au système décisionnel <strong>de</strong> contrôler que les résultats obt<strong>en</strong>us sur le système<br />
physique sont conformes à l’att<strong>en</strong><strong>du</strong> et dans le cas contraire, va lui permettre <strong>de</strong> rectifier les<br />
ordres.<br />
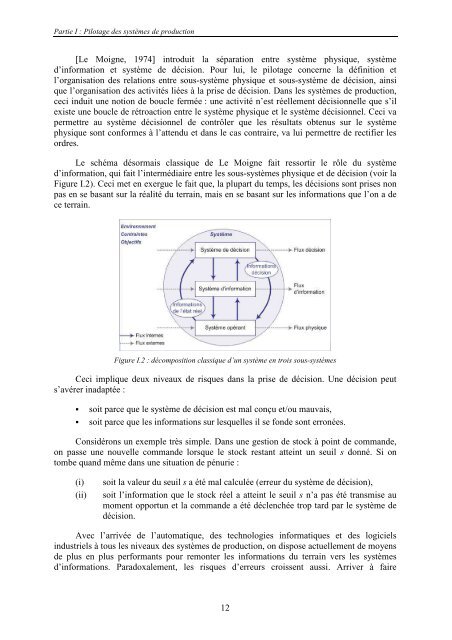
Le schéma désormais classique <strong>de</strong> Le Moigne fait ressortir le rôle <strong>du</strong> système<br />
d’information, qui fait l’intermédiaire <strong>en</strong>tre les sous-systèmes physique et <strong>de</strong> décision (voir la<br />
Figure I.2). Ceci met <strong>en</strong> exergue le fait que, la plupart <strong>du</strong> temps, les décisions sont prises non<br />
pas <strong>en</strong> se basant sur la réalité <strong>du</strong> terrain, mais <strong>en</strong> se basant sur les informations que l’on a <strong>de</strong><br />
ce terrain.<br />
Figure I.2 : décomposition classique d’un système <strong>en</strong> trois sous-systèmes<br />
Ceci implique <strong>de</strong>ux niveaux <strong>de</strong> risques dans la prise <strong>de</strong> décision. Une décision peut<br />
s’avérer inadaptée :<br />
<br />
<br />
soit parce que le système <strong>de</strong> décision est mal conçu et/ou mauvais,<br />
soit parce que les informations sur lesquelles il se fon<strong>de</strong> sont erronées.<br />
Considérons un exemple très simple. Dans une gestion <strong>de</strong> stock à point <strong>de</strong> comman<strong>de</strong>,<br />
on passe une nouvelle comman<strong>de</strong> lorsque le stock restant atteint un seuil s donné. Si on<br />
tombe quand même dans une situation <strong>de</strong> pénurie :<br />
(i)<br />
(ii)<br />
soit la valeur <strong>du</strong> seuil s a été mal calculée (erreur <strong>du</strong> système <strong>de</strong> décision),<br />
soit l’information que le stock réel a atteint le seuil s n’a pas été transmise au<br />
mom<strong>en</strong>t opportun et la comman<strong>de</strong> a été décl<strong>en</strong>chée trop tard par le système <strong>de</strong><br />
décision.<br />
Avec l’arrivée <strong>de</strong> l’automatique, <strong>de</strong>s technologies informatiques et <strong>de</strong>s logiciels<br />
in<strong>du</strong>striels à tous les niveaux <strong>de</strong>s systèmes <strong>de</strong> pro<strong>du</strong>ction, on dispose actuellem<strong>en</strong>t <strong>de</strong> moy<strong>en</strong>s<br />
<strong>de</strong> plus <strong>en</strong> plus performants pour remonter les informations <strong>du</strong> terrain vers les systèmes<br />
d’informations. Paradoxalem<strong>en</strong>t, les risques d’erreurs croiss<strong>en</strong>t aussi. Arriver à faire<br />
12














