

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
237<br />
Mario Vultaggio<br />
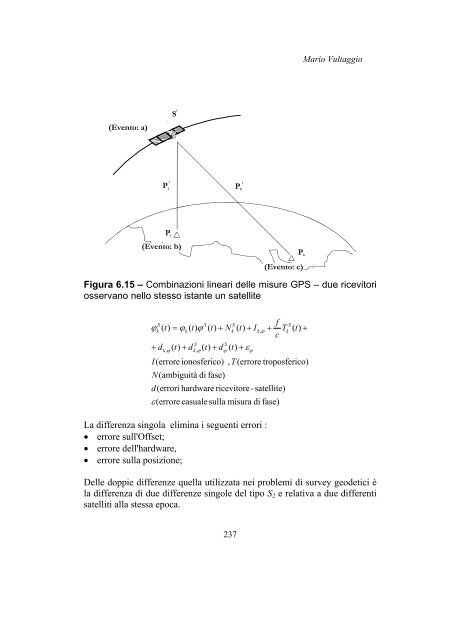
Figura <strong>6.1</strong>5 <strong>–</strong> Combinazioni lineari <strong>del</strong>le misure <strong>GPS</strong> <strong>–</strong> due ricevitori<br />
osservano nello stesso istante un satellite<br />
S<br />
S<br />
ϕ ( t)<br />
= ϕ ( t)<br />
ϕ ( t)<br />
+ N<br />
k<br />
+ d<br />
k , ϕ<br />
k<br />
( t)<br />
+ d<br />
S<br />
k , ϕ<br />
( t)<br />
+ d<br />
S<br />
ϕ<br />
S<br />
k<br />
( t)<br />
+ I<br />
( t)<br />
+ ε<br />
k , ϕ<br />
( t)<br />
+<br />
I(<br />
errore ionosferico)<br />
, T ( errore troposferico)<br />
N(<br />
ambiguità di fase)<br />
d(<br />
errori hardware ricevitore -satellite)<br />
ε (errore casuale sulla misura di fase)<br />
La differenza singola elimina i seguenti errori :<br />
• errore sull'Offset;<br />
• errore <strong>del</strong>l'hardware,<br />
• errore sulla posizione;<br />
Delle doppie differenze quella utilizzata nei problemi di survey geodetici è<br />
la differenza di due differenze singole <strong>del</strong> tipo S2 e relativa a due differenti<br />
satelliti alla stessa epoca.<br />
ϕ<br />
+<br />
f<br />
c<br />
T<br />
S<br />
k














