

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SV clock<br />
bias<br />
(s)<br />
SV clock<br />
drift<br />
(s/s)<br />
313<br />
Mario Vultaggio<br />
-3.03029082e-5 0.0002800053 3.18903e-5 -0.0002054530 -7.7147968e-5<br />
1.47792889e-12 -1.64845914e-11 1.2505552e-12 -1.36424205e-12 2.16004991e-12<br />
Toe (s) 151200 151200 151200 153720 155160<br />
Week 1201 1201 1201 1201 1201<br />
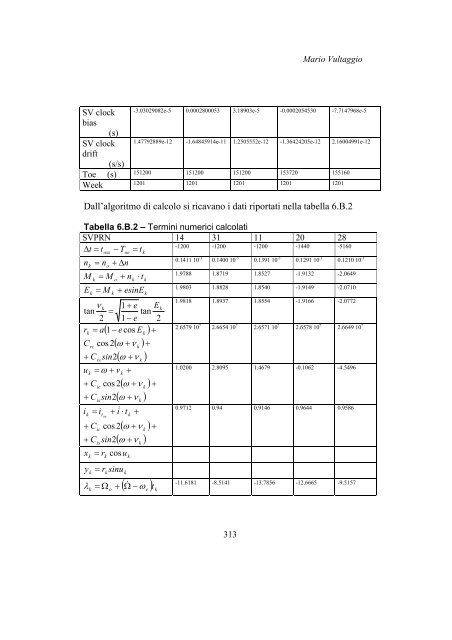
Dall’algoritmo di calcolo si ricavano i dati riportati nella tabella 6.B.2<br />
Tabella 6.B.2 <strong>–</strong> Termini numerici calcolati<br />
SVPRN 14 31 11 20 28<br />
Δ t = t − T = t<br />
-1200 -1200 -1200 -1440 -5160<br />
oss oe k<br />
nk = no<br />
+ Δn<br />
0.1411 10 -3 0.1400 10 -3 0.1391 10 -3 0.1291 10 -3 0.1210 10 -3<br />
M k = M o + nk<br />
⋅ tk<br />
1.9788 1.8719 1.8527 -1.9132 -2.0649<br />
E k = M k + esinEk<br />
1.9803 1.8828 1.8540 -1.9149 -2.0710<br />
ν k 1 + Ek<br />
1.9818 1.8937 1.8554 -1.9166 -2.0772<br />
tan<br />
2<br />
=<br />
e<br />
tan<br />
1 − e 2<br />
r = a 1 − e cos E +<br />
k<br />
C<br />
rc<br />
+ C<br />
u<br />
k<br />
+ C<br />
cos<br />
rs<br />
ic<br />
( k )<br />
2(<br />
ω + ν k ) +<br />
2(<br />
ω + ν )<br />
sin<br />
= ω + v<br />
cos<br />
+ Cis<br />
sin2<br />
= i + i&<br />
⋅ t<br />
ik toe<br />
+ C<br />
+ C<br />
ic<br />
is<br />
cos<br />
sin2<br />
k<br />
x = r cosu<br />
k<br />
k<br />
y = r sinu<br />
k<br />
k<br />
+<br />
k<br />
2(<br />
ω + ν k )<br />
( ω + ν )<br />
k<br />
+<br />
k<br />
2(<br />
ω + ν k )<br />
( ω + ν )<br />
λ = Ω + & −<br />
k<br />
o<br />
k<br />
k<br />
k<br />
+<br />
+<br />
( Ω ω e ) tk<br />
2.6579 10 7 2.6654 10 7 2.6571 10 7 2.6578 10 7 2.6649 10 7<br />
1.0200 2.8095 1.4679 -0.1062 -4.5496<br />
0.9712 0.94 0.9146 0.9644 0.9586<br />
-11.6181 -8.5141 -13.7856 -12.6665 -9.5157














