

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
254<br />
<strong>Capitolo</strong> 6 <strong>–</strong> <strong>Il</strong> <strong>GPS</strong><br />
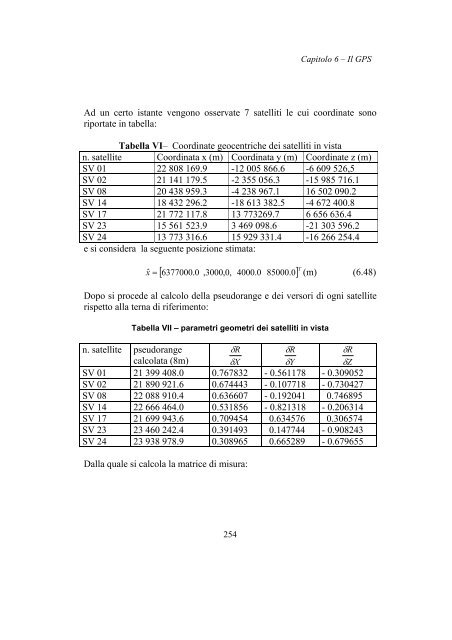
Ad un certo istante vengono osservate 7 satelliti le cui coordinate sono<br />
riportate in tabella:<br />
Tabella VI<strong>–</strong> Coordinate geocentriche dei satelliti in vista<br />
n. satellite Coordinata x (m) Coordinata y (m) Coordinate z (m)<br />
SV 01 22 808 169.9 -12 005 866.6 -6 609 526,5<br />
SV 02 21 141 179.5 -2 355 056.3 -15 985 71<strong>6.1</strong><br />
SV 08 20 438 959.3 -4 238 967.1 16 502 090.2<br />
SV 14 18 432 296.2 -18 613 382.5 -4 672 400.8<br />
SV 17 21 772 117.8 13 773269.7 6 656 636.4<br />
SV 23 15 561 523.9 3 469 098.6 -21 303 596.2<br />
SV 24 13 773 316.6 15 929 331.4 -16 266 254.4<br />
e si considera la seguente posizione stimata:<br />
[ ] T<br />
6377000.<br />
0 , 3000,<br />
0,<br />
4000.<br />
0 85000.<br />
xˆ = 0 (m) (6.48)<br />
Dopo si procede al calcolo <strong>del</strong>la pseudorange e dei versori di ogni satellite<br />
rispetto alla terna di riferimento:<br />
Tabella VII <strong>–</strong> parametri geometri dei satelliti in vista<br />
n. satellite pseudorange<br />
δ R<br />
δ R<br />
δ R<br />
calcolata (8m) δX<br />
δY<br />
δZ<br />
SV 01 21 399 408.0 0.767832 - 0.561178 - 0.309052<br />
SV 02 21 890 921.6 0.674443 - 0.107718 - 0.730427<br />
SV 08 22 088 910.4 0.636607 - 0.192041 0.746895<br />
SV 14 22 666 464.0 0.531856 - 0.821318 - 0.206314<br />
SV 17 21 699 943.6 0.709454 0.634576 0.306574<br />
SV 23 23 460 242.4 0.391493 0.147744 - 0.908243<br />
SV 24 23 938 978.9 0.308965 0.665289 - 0.679655<br />
Dalla quale si calcola la matrice di misura:














