

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
R Z<br />
⎡cos(<br />
Ω k ) − sin( Ω k )<br />
( Ω)<br />
=<br />
⎢<br />
⎢<br />
sin( Ω k ) cos( Ω k )<br />
⎢⎣<br />
0 0<br />
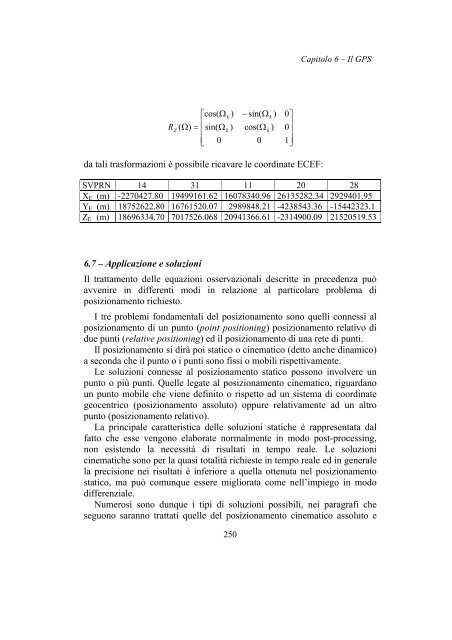
da tali trasformazioni è possibile ricavare le coordinate ECEF:<br />
250<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
<strong>Capitolo</strong> 6 <strong>–</strong> <strong>Il</strong> <strong>GPS</strong><br />
SVPRN 14 31 11 20 28<br />
XE (m) -2270427.80 19499161.62 16078340.96 26135282.34 2929401.95<br />
YE (m) 18752622.80 16761520.07 2989848.21 -4238543.36 -15442323.1<br />
ZE (m) 18696334.70 7017526.068 20941366.61 -2314900.09 21520519.53<br />
6.7 <strong>–</strong> Applicazione e soluzioni<br />
<strong>Il</strong> trattamento <strong>del</strong>le equazioni osservazionali descritte in precedenza può<br />
avvenire in differenti modi in relazione al particolare problema di<br />
posizionamento richiesto.<br />
I tre problemi fondamentali <strong>del</strong> posizionamento sono quelli connessi al<br />
posizionamento di un punto (point positioning) posizionamento relativo di<br />
due punti (relative positioning) ed il posizionamento di una rete di punti.<br />
<strong>Il</strong> posizionamento si dirà poi statico o cinematico (detto anche dinamico)<br />
a seconda che il punto o i punti sono fissi o mobili rispettivamente.<br />
Le soluzioni connesse al posizionamento statico possono involvere un<br />
punto o più punti. Quelle legate al posizionamento cinematico, riguardano<br />
un punto mobile che viene definito o rispetto ad un <strong>sistema</strong> di coordinate<br />
geocentrico (posizionamento assoluto) oppure relativamente ad un altro<br />
punto (posizionamento relativo).<br />
La principale caratteristica <strong>del</strong>le soluzioni statiche è rappresentata dal<br />
fatto che esse vengono elaborate normalmente in modo post-processing,<br />
non esistendo la necessità di risultati in tempo reale. Le soluzioni<br />
cinematiche sono per la quasi totalità richieste in tempo reale ed in generale<br />
la precisione nei risultati è inferiore a quella ottenuta nel posizionamento<br />
statico, ma può comunque essere migliorata come nell’impiego in modo<br />
differenziale.<br />
Numerosi sono dunque i tipi di soluzioni possibili, nei paragrafi che<br />
seguono saranno trattati quelle <strong>del</strong> posizionamento cinematico assoluto e














