

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
tan λ =<br />
Y<br />
X<br />
,<br />
2<br />
Z + e Nsenφ<br />
tanφ<br />
=<br />
,<br />
2 2<br />
X + Y<br />
302<br />
h =<br />
2<br />
X + Y<br />
cosφ<br />
<strong>Capitolo</strong> 6 <strong>–</strong> <strong>Il</strong> <strong>GPS</strong><br />
2<br />
− N<br />
(<strong>6.1</strong>04)<br />
con a semiasse maggiore, e 2 eccentricità ed N la gran normale<br />
<strong>del</strong>l’ellissoide di riferimento nel punto considerato.<br />
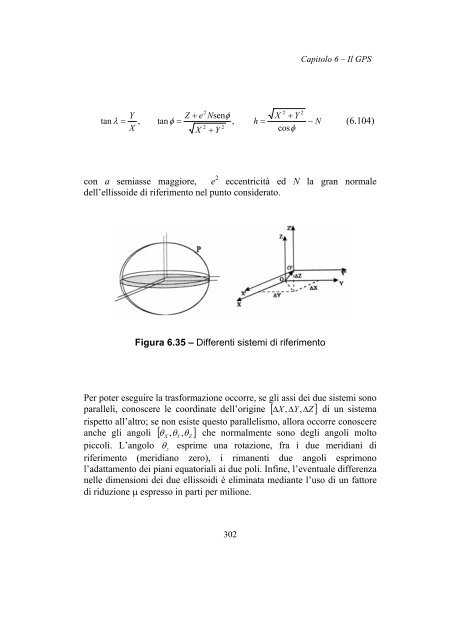
Figura 6.35 <strong>–</strong> Differenti sistemi di riferimento<br />
Per poter eseguire la trasformazione occorre, se gli assi dei due sistemi sono<br />
paralleli, conoscere le coordinate <strong>del</strong>l’origine [ Δ X , ΔY,<br />
ΔZ<br />
] di un <strong>sistema</strong><br />
rispetto all’altro; se non esiste questo parallelismo, allora occorre conoscere<br />
anche gli angoli [ θ X , θY<br />
, θZ<br />
] che normalmente sono degli angoli molto<br />
piccoli. L’angolo θ z esprime una rotazione, fra i due meridiani di<br />
riferimento (meridiano zero), i rimanenti due angoli esprimono<br />
l’adattamento dei piani equatoriali ai due poli. Infine, l’eventuale differenza<br />
nelle dimensioni dei due ellissoidi è eliminata mediante l’uso di un fattore<br />
di riduzione μ espresso in parti per milione.














