

Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...
Capitolo 6 Il Sistema Satellitare GPS 6.1 – Descrizione del sistema ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
APPENDICE 6.A<br />
307<br />
Mario Vultaggio<br />
6.A.1 - <strong>Il</strong> messaggio di navigazione <strong>GPS</strong><br />
<strong>Il</strong> messaggio di navigazione è generato secondo un formato standard<br />
chiamato ”Data Frame”. Ogni dataframe è costituito da 5 subframes<br />
ciascuno dei quali contiene 300 bits. Ogni subframe contiene 10 parole<br />
(words) di 30 bits. La struttura <strong>del</strong> dataframe è riportata nella figura 6.A.1:<br />
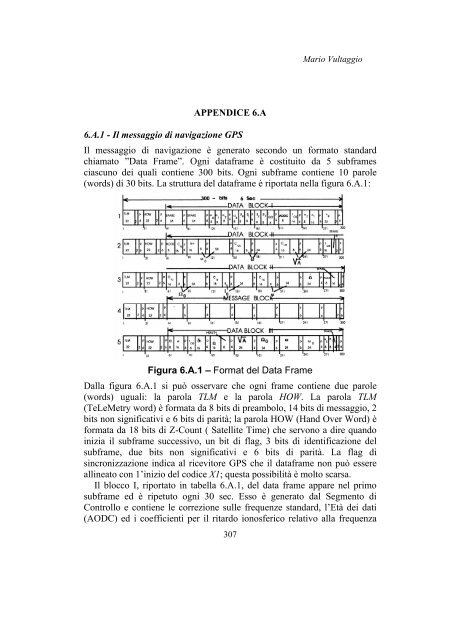
Figura 6.A.1 <strong>–</strong> Format <strong>del</strong> Data Frame<br />
Dalla figura 6.A.1 si può osservare che ogni frame contiene due parole<br />
(words) uguali: la parola TLM e la parola HOW. La parola TLM<br />
(TeLeMetry word) è formata da 8 bits di preambolo, 14 bits di messaggio, 2<br />
bits non significativi e 6 bits di parità; la parola HOW (Hand Over Word) è<br />
formata da 18 bits di Z-Count ( Satellite Time) che servono a dire quando<br />
inizia il subframe successivo, un bit di flag, 3 bits di identificazione <strong>del</strong><br />
subframe, due bits non significativi e 6 bits di parità. La flag di<br />
sincronizzazione indica al ricevitore <strong>GPS</strong> che il dataframe non può essere<br />
allineato con 1’inizio <strong>del</strong> codice X1; questa possibilità è molto scarsa.<br />
<strong>Il</strong> blocco I, riportato in tabella 6.A.1, <strong>del</strong> data frame appare nel primo<br />
subframe ed è ripetuto ogni 30 sec. Esso è generato dal Segmento di<br />
Controllo e contiene le correzione sulle frequenze standard, l’Età dei dati<br />
(AODC) ed i coefficienti per il ritardo ionosferico relativo alla frequenza














