

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
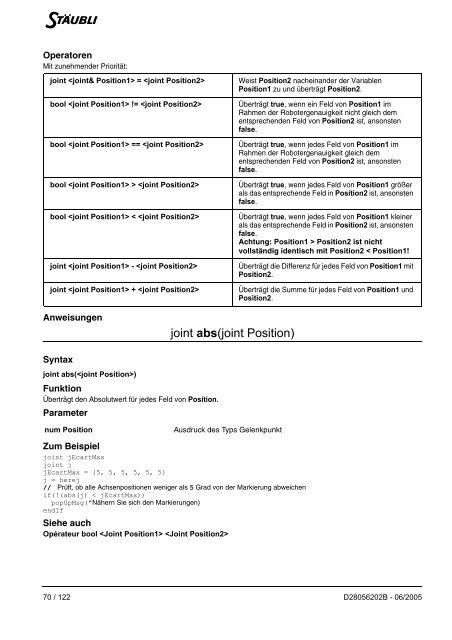
Operatoren<br />
Mit zunehmen<strong>de</strong>r Priorität:<br />
joint = Weist Position2 nacheinan<strong>de</strong>r <strong>de</strong>r Variablen<br />
Position1 zu und überträgt Position2.<br />
bool != Überträgt true, wenn ein Feld von Position1 im<br />
Rahmen <strong>de</strong>r Robotergenauigkeit nicht gleich <strong>de</strong>m<br />
entsprechen<strong>de</strong>n Feld von Position2 ist, ansonsten<br />
false.<br />
bool == Überträgt true, wenn je<strong>de</strong>s Feld von Position1 im<br />
Rahmen <strong>de</strong>r Robotergenauigkeit gleich <strong>de</strong>m<br />
entsprechen<strong>de</strong>n Feld von Position2 ist, ansonsten<br />
false.<br />
bool > Überträgt true, wenn je<strong>de</strong>s Feld von Position1 größer<br />
als das entsprechen<strong>de</strong> Feld in Position2 ist, ansonsten<br />
false.<br />
bool < Überträgt true, wenn je<strong>de</strong>s Feld von Position1 kleiner<br />
als das entsprechen<strong>de</strong> Feld in Position2 ist, ansonsten<br />
false.<br />
Achtung: Position1 > Position2 ist nicht<br />
vollständig i<strong>de</strong>ntisch mit Position2 < Position1!<br />
joint - Überträgt die Differenz für je<strong>de</strong>s Feld von Position1 mit<br />
Position2.<br />
joint + Überträgt die Summe für je<strong>de</strong>s Feld von Position1 und<br />
Position2.<br />
Anweisungen<br />
Syntax<br />
joint abs()<br />
Funktion<br />
Überträgt <strong>de</strong>n Absolutwert für je<strong>de</strong>s Feld von Position.<br />
Parameter<br />
joint abs(joint Position)<br />
num Position Ausdruck <strong>de</strong>s Typs Gelenkpunkt<br />
Zum Beispiel<br />
joint jEcartMax<br />
joint j<br />
jEcartMax = {5, 5, 5, 5, 5, 5}<br />
j = herej<br />
// Prüft, ob alle Achsenpositionen weniger als 5 Grad von <strong>de</strong>r Markierung abweichen<br />
if(!(abs(j) < jEcartMax))<br />
popUpMsg("Nähern Sie sich <strong>de</strong>n Markierungen)<br />
endIf<br />
Siehe auch<br />
Opérateur bool <br />
70 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong>













