

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
TYP CONFIG<br />
Die Konfiguration eines kartesischen Punktes gehört zu <strong>de</strong>n komplexeren Funktionen und kann beim ersten Lesen<br />
übergangen wer<strong>de</strong>n.<br />
Einleitung<br />
Im Allgemeinen hat <strong>de</strong>r Roboter mehrere Möglichkeiten, eine in kartesischen Koordinaten angegebene Position<br />
anzufahren.<br />
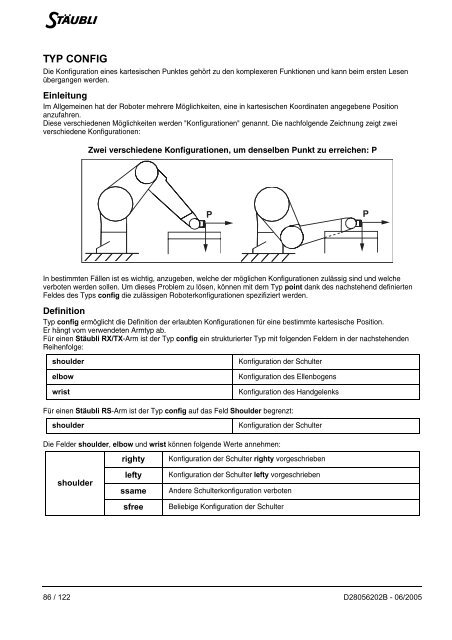
Diese verschie<strong>de</strong>nen Möglichkeiten wer<strong>de</strong>n "Konfigurationen" genannt. Die nachfolgen<strong>de</strong> Zeichnung zeigt zwei<br />
verschie<strong>de</strong>ne Konfigurationen:<br />
Zwei verschie<strong>de</strong>ne Konfigurationen, um <strong>de</strong>nselben Punkt zu erreichen: P<br />
In bestimmten Fällen ist es wichtig, anzugeben, welche <strong>de</strong>r möglichen Konfigurationen zulässig sind und welche<br />
verboten wer<strong>de</strong>n sollen. Um dieses Problem zu lösen, können mit <strong>de</strong>m Typ point dank <strong>de</strong>s nachstehend <strong>de</strong>finierten<br />
Fel<strong>de</strong>s <strong>de</strong>s Typs config die zulässigen Roboterkonfigurationen spezifiziert wer<strong>de</strong>n.<br />
Definition<br />
Typ config ermöglicht die Definition <strong>de</strong>r erlaubten Konfigurationen für eine bestimmte kartesische Position.<br />
Er hängt vom verwen<strong>de</strong>ten Armtyp ab.<br />
Für einen Stäubli RX/TX-Arm ist <strong>de</strong>r Typ config ein strukturierter Typ mit folgen<strong>de</strong>n Fel<strong>de</strong>rn in <strong>de</strong>r nachstehen<strong>de</strong>n<br />
Reihenfolge:<br />
shoul<strong>de</strong>r Konfiguration <strong>de</strong>r Schulter<br />
elbow Konfiguration <strong>de</strong>s Ellenbogens<br />
wrist Konfiguration <strong>de</strong>s Handgelenks<br />
Für einen Stäubli RS-Arm ist <strong>de</strong>r Typ config auf das Feld Shoul<strong>de</strong>r begrenzt:<br />
shoul<strong>de</strong>r Konfiguration <strong>de</strong>r Schulter<br />
Die Fel<strong>de</strong>r shoul<strong>de</strong>r, elbow und wrist können folgen<strong>de</strong> Werte annehmen:<br />
shoul<strong>de</strong>r<br />
righty Konfiguration <strong>de</strong>r Schulter righty vorgeschrieben<br />
lefty Konfiguration <strong>de</strong>r Schulter lefty vorgeschrieben<br />
ssame An<strong>de</strong>re Schulterkonfiguration verboten<br />
sfree Beliebige Konfiguration <strong>de</strong>r Schulter<br />
P P<br />
86 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong>













