

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
REFERENZANLEITUNG VAL3 - Version 5.2<br />
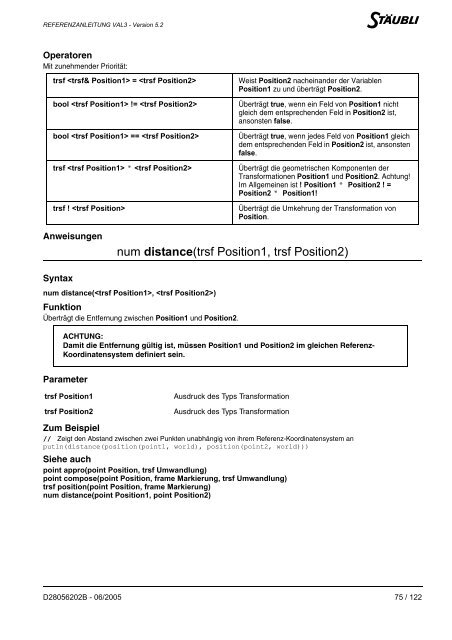
Operatoren<br />
Mit zunehmen<strong>de</strong>r Priorität:<br />
trsf = Weist Position2 nacheinan<strong>de</strong>r <strong>de</strong>r Variablen<br />
Position1 zu und überträgt Position2.<br />
bool != Überträgt true, wenn ein Feld von Position1 nicht<br />
gleich <strong>de</strong>m entsprechen<strong>de</strong>n Feld in Position2 ist,<br />
ansonsten false.<br />
bool == Überträgt true, wenn je<strong>de</strong>s Feld von Position1 gleich<br />
<strong>de</strong>m entsprechen<strong>de</strong>n Feld in Position2 ist, ansonsten<br />
false.<br />
trsf Überträgt die geometrischen Komponenten <strong>de</strong>r<br />
Transformationen Position1 und Position2. Achtung!<br />
Im Allgemeinen ist ! Position1 Position2 ! =<br />
Position2 Position1!<br />
trsf ! Überträgt die Umkehrung <strong>de</strong>r Transformation von<br />
Position.<br />
Anweisungen<br />
Syntax<br />
num distance(trsf Position1, trsf Position2)<br />
num distance(, )<br />
Funktion<br />
Überträgt die Entfernung zwischen Position1 und Position2.<br />
ACHTUNG:<br />
Damit die Entfernung gültig ist, müssen Position1 und Position2 im gleichen Referenz-<br />
Koordinatensystem <strong>de</strong>finiert sein.<br />
Parameter<br />
trsf Position1 Ausdruck <strong>de</strong>s Typs Transformation<br />
trsf Position2 Ausdruck <strong>de</strong>s Typs Transformation<br />
Zum Beispiel<br />
// Zeigt <strong>de</strong>n Abstand zwischen zwei Punkten unabhängig von ihrem Referenz-Koordinatensystem an<br />
putln(distance(position(point1, world), position(point2, world)))<br />
Siehe auch<br />
point appro(point Position, trsf Umwandlung)<br />
point compose(point Position, frame Markierung, trsf Umwandlung)<br />
trsf position(point Position, frame Markierung)<br />
num distance(point Position1, point Position2)<br />
D28056202B - <strong>06</strong>/<strong>2005</strong> 75 / 122













