

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
REFERENZANLEITUNG VAL3 - Version 5.2<br />
BEWEGUNGSSTEUERUNG<br />
BEWEGUNGSSTEUERUNG<br />
Um eine Roboterbahn zu <strong>de</strong>finieren, genügt es nicht, nur eine Reihe von Punkten anzugeben. Es müssen außer<strong>de</strong>m<br />
die Art <strong>de</strong>r zwischen diesen Punkten verwen<strong>de</strong>ten Bahnen (Kurven- o<strong>de</strong>r Gera<strong>de</strong>nabschnitte) sowie die Art <strong>de</strong>r<br />
Anschlüsse zwischen diesen Abschnitten und schließlich die Geschwindigkeitsparameter für diese Bewegung<br />
festgelegt wer<strong>de</strong>n. Dieses Kapitel gibt eine Einführung in Punkt-zu-Punkt-Bewegungen und geradlinige Bewegungen<br />
(Anweisungen movej und movel) und beschreibt, wie die Parameter <strong>de</strong>s Bewegungs<strong>de</strong>skriptors (Typ m<strong>de</strong>sc) zu<br />
verwen<strong>de</strong>n sind.<br />
Bewegungstypen: Punkt-zu-Punkt, geradlinig, kreisförmig<br />
Roboterbewegungen wer<strong>de</strong>n vor allem mit <strong>de</strong>n Anweisungen movej, movel und movec programmiert. Mit movej<br />
wer<strong>de</strong>n Punkt-zu-Punkt-Bewegungen, mit movel geradlinige Bewegungen und mit movec kreisförmige Bewegungen<br />
ausgeführt.<br />
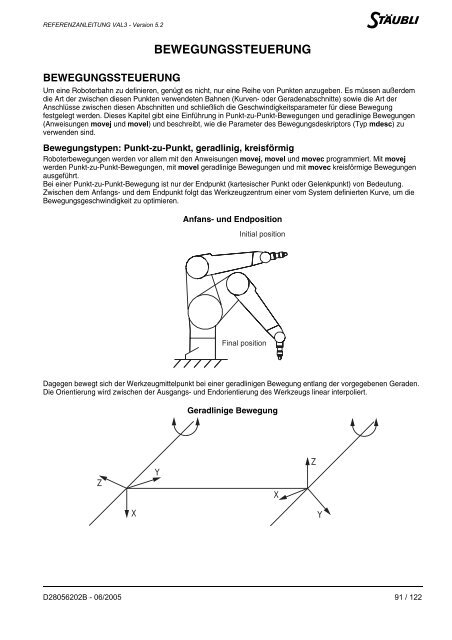
Bei einer Punkt-zu-Punkt-Bewegung ist nur <strong>de</strong>r Endpunkt (kartesischer Punkt o<strong>de</strong>r Gelenkpunkt) von Be<strong>de</strong>utung.<br />
Zwischen <strong>de</strong>m Anfangs- und <strong>de</strong>m Endpunkt folgt das Werkzeugzentrum einer vom System <strong>de</strong>finierten Kurve, um die<br />
Bewegungsgeschwindigkeit zu optimieren.<br />
Anfans- und Endposition<br />
Dagegen bewegt sich <strong>de</strong>r Werkzeugmittelpunkt bei einer geradlinigen Bewegung entlang <strong>de</strong>r vorgegebenen Gera<strong>de</strong>n.<br />
Die Orientierung wird zwischen <strong>de</strong>r Ausgangs- und Endorientierung <strong>de</strong>s Werkzeugs linear interpoliert.<br />
Z<br />
X<br />
Y<br />
Initial position<br />
Final position<br />
Geradlinige Bewegung<br />
D28056202B - <strong>06</strong>/<strong>2005</strong> 91 / 122<br />
X<br />
Z<br />
Y













