

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
REFERENZANLEITUNG VAL3 - Version 5.2<br />
Orientierung<br />
x1<br />
Orientierung<br />
z1<br />
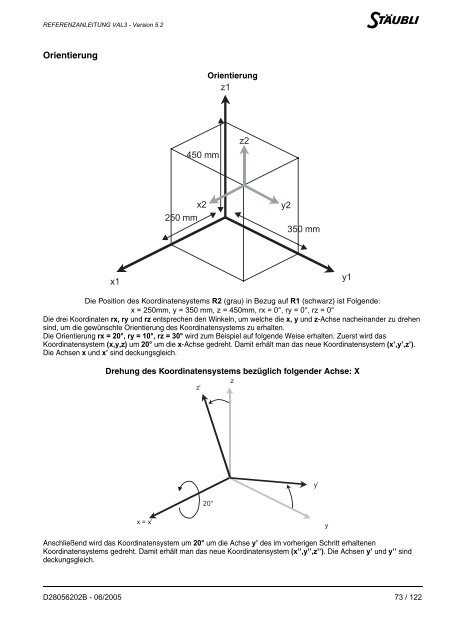
Die Position <strong>de</strong>s Koordinatensystems R2 (grau) in Bezug auf R1 (schwarz) ist Folgen<strong>de</strong>:<br />
x = 250mm, y = 350 mm, z = 450mm, rx = 0°, ry = 0°, rz = 0°<br />
Die drei Koordinaten rx, ry und rz entsprechen <strong>de</strong>n Winkeln, um welche die x, y und z-Achse nacheinan<strong>de</strong>r zu drehen<br />
sind, um die gewünschte Orientierung <strong>de</strong>s Koordinatensystems zu erhalten.<br />
Die Orientierung rx = 20°, ry = 10°, rz = 30° wird zum Beispiel auf folgen<strong>de</strong> Weise erhalten. Zuerst wird das<br />
Koordinatensystem (x,y,z) um 20° um die x-Achse gedreht. Damit erhält man das neue Koordinatensystem (x’,y’,z’).<br />
Die Achsen x und x’ sind <strong>de</strong>ckungsgleich.<br />
Drehung <strong>de</strong>s Koordinatensystems bezüglich folgen<strong>de</strong>r Achse: X<br />
x = x’<br />
450 mm<br />
x2 y2<br />
250 mm<br />
350 mm<br />
z’<br />
20°<br />
Anschließend wird das Koordinatensystem um 20° um die Achse y’ <strong>de</strong>s im vorherigen Schritt erhaltenen<br />
Koordinatensystems gedreht. Damit erhält man das neue Koordinatensystem (x’’,y’’,z’’). Die Achsen y’ und y’’ sind<br />
<strong>de</strong>ckungsgleich.<br />
z<br />
D28056202B - <strong>06</strong>/<strong>2005</strong> 73 / 122<br />
z2<br />
y’<br />
y<br />
y1













