

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
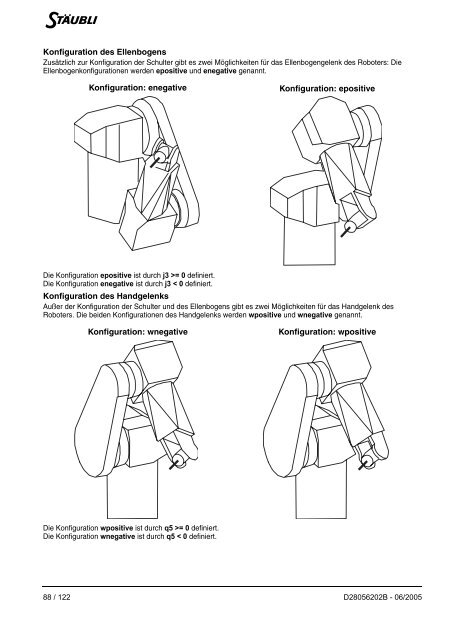
Konfiguration <strong>de</strong>s Ellenbogens<br />
Zusätzlich zur Konfiguration <strong>de</strong>r Schulter gibt es zwei Möglichkeiten für das Ellenbogengelenk <strong>de</strong>s Roboters: Die<br />
Ellenbogenkonfigurationen wer<strong>de</strong>n epositive und enegative genannt.<br />
Konfiguration: enegative Konfiguration: epositive<br />
Die Konfiguration epositive ist durch j3 >= 0 <strong>de</strong>finiert.<br />
Die Konfiguration enegative ist durch j3 < 0 <strong>de</strong>finiert.<br />
Konfiguration <strong>de</strong>s Handgelenks<br />
Außer <strong>de</strong>r Konfiguration <strong>de</strong>r Schulter und <strong>de</strong>s Ellenbogens gibt es zwei Möglichkeiten für das Handgelenk <strong>de</strong>s<br />
Roboters. Die bei<strong>de</strong>n Konfigurationen <strong>de</strong>s Handgelenks wer<strong>de</strong>n wpositive und wnegative genannt.<br />
Konfiguration: wnegative Konfiguration: wpositive<br />
Die Konfiguration wpositive ist durch q5 >= 0 <strong>de</strong>finiert.<br />
Die Konfiguration wnegative ist durch q5 < 0 <strong>de</strong>finiert.<br />
88 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong>













